重要说明;
本文系中国叉车网(www.chinaforklift.com)和中国AGV网(www.chinaagv.com)小编费洪荒之力,编译自国际机器人联合会(www.ifr.org)--“A Mobile Revolution How mobility is reshaping robotics”报告。
文章从“当今移动机器人之技术”、“硬件和软件的发展所带来的新功能”、“工作中的自主移动机器人”、“移动机器人对工作和生活的影响”、“安全和保障”、“商业领域的考虑”、“机器人技术中移动性的未来”做详尽阐述。 作为一家国际性行业权威机构,内容对于中国从业者来说,可以探寻移动机器人的发展方向和未来。难免有瑕疵,仅供参考!
中叉网和AGV网响应IFR呼吁,让我们张臂拥抱移动革命的到来!
正文:
一、当今移动机器人之技术
地球人都知道,机器人自主和自动移动性是一套改变游戏规则之技术,它正在促成新的行业商业模式,提高工作效率和可持续性,并使众多行业的工作更加安全和更价值。其硬件和软件的快速发展,正导致移动机器人在诸多行业领域呈蓬勃发展态势。
自主移动机器人(AMR)之所以得以快速发展,因其拥有自主导航和执行其他功能的能力。它可能拥有一个移动基地,一个带有机械臂的移动平台和一个带有定制用户界面的完整移动应用。
毫无疑问,AMR正在改变各种重要领域的工作方式。本文重点讨论AMR在制造、物流、医疗、零售和公共环境中的案例。
(1) AMR帮助高混合/低产量环境中的制造商迅速调整生产以满足需求。其促成旨在支持灵活生产的新商业模式。同时还提供数据,可用于改善单个过程的性能,并建立一个实时的生产概况。
(2)AMR在物流领域有一个广阔和蓬勃发展的市场,其被用于在整个仓库中运输货物。硬件和软件的发展使AMR能够识别和正确处理非标准的形状。在"最后一公里"运送到收件人家门口方面,出现了许许多多的新创公司。
(3)AMR在医疗保健中被用于运输医院和护理设施中的床单、材料和药物;清洁和消毒用品;以及配送药物。医护人员的助理机器人,也得到了很大的发展。
(4)AMR被用于零售业的订单执行、盘点和客户服务。在机器人拣选履行订单方面也有发展。
(5)AMR在公共环境中的应用越来越广泛,如机场、酒店和购物中心。应用包括:信息机器人;送货--如酒店客房服务;清洁和消毒;以及安全领域。
AMR经常充当"胶水",将整个过程中原本互不相干的部分联系起来,产生的数据可用于获得整个过程的实时性能概况。这样做的好处是减少工厂的浪费,提高工厂和仓库的效率,以及提高生产和保健的质量和安全。AMR在制造和物流领域实现了新的商业模式,帮助公司在小批量、高混合生产的环境中保持竞争力。
AMR改善了工作条件,可以去承担危险的、不符合人体工程学的和乏味的重复劳动。并在许多方面使我们的日常生活变得更好,从改善医疗保健到改善产品供应。
硬件和软件的发展使自主性、导航、视觉和传感、车队管理、互操作性、边缘/云计算模型和运动方面取得快速进展。更轻的材料、机器人机体、抓手和轮子正在使机器人更轻、更灵活--降低成本并提高功能。
AMR的发展正在快速进行中。原因之一是这些技术的进步适用于许多不同的行业领域。因此,一个行业的应用解决方案可以迅速适应到另一个行业。开发人员正在将目光转向帮助建立和管理流程的辅助系统,包括将移动机器人及其编程能力整合到自动化系统中。这降低了实施和运行机器人的总体成本,无疑会刺激机器人的采用。最后,新的租赁模式使公司在自动化的财务规划方面具有更大的灵活性。
引言
许多年来,机器人一直集中在工业环境中,在围栏中工作,与人员保持距离。在过去的几年里,这种情况正发生了迅速变化,因为新技术使机器人能够与人类一起工作,并在工作和公共场所与人们互动,这对公司、雇员和公共生活中的个人都大有裨益。

商业盘点机器人,图片来源:PAL-Robotics
移动性是这一转变的关键推动因素。移动机器人正在促成新的商业模式,并改变一系列工业部门的工作性质。AMR的增长尤为强劲,它可以在工业和服务部门自主导航和执行其他功能。
来自国际机器人联合会(IFR)的一份资料文件
例如,在2014年至2019年期间,物流机器人(几乎都是AMR)的单体台量销售增加了6倍,IFR预测,在2020年到2023年,AMR单体台量销售平均每年增长31%。AMR在公共环境中的使用也在迅速增加--例如,IFR预测,在2020年到2023年,移动引导、信息和远程控制机器人的单位销售量年复合增长率达40%。
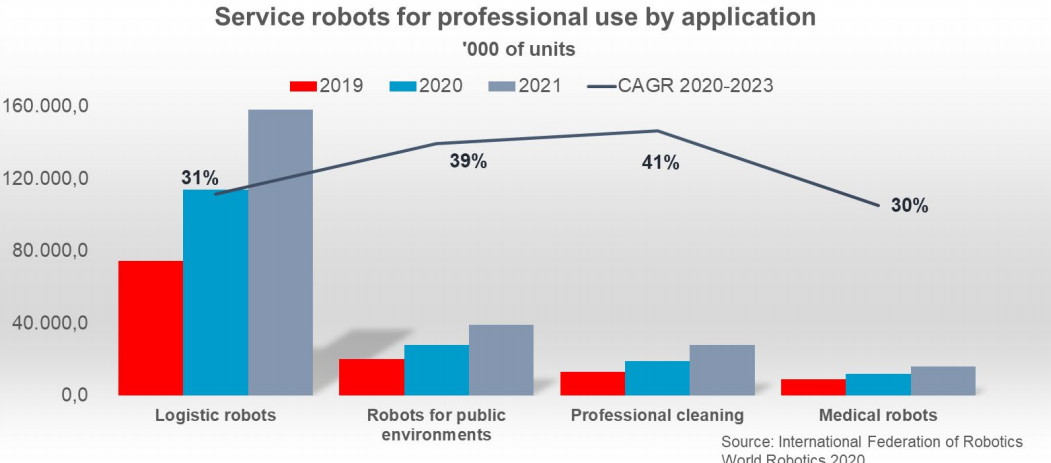
用于专业用途的服务机器人--主要的应用领域。图片来源:IFR
AMR使企业能够提高产品和服务的质量,有效地应对快速变化的客户需求,保持竞争力,并为员工提供一个更安全、更激励的工作环境。
在本文中,国际机器人联合会概述了诸如AMR在那些机器人产生最重大影响的行业中的主要使用情况。制造业、物流业、医疗保健业、零售业和公共环境。为人们会评估和实施AMR的正确方法提供指导,就适用的安全标准做了一个相当详尽的概述。
最后,关于服务机器人的不同应用领域(包括本文提到的领域)的更详细分析,典型产品和供应商的选择,以及市场的详细统计分析。
让我们张臂拥抱移动革命的到来!
虽然研究人员自20世纪40年代以来一直在研究自主移动之技术,但AMR只是在过去十年中才得以在商业上应用。这主要是由于更强大、更便宜的计算能力的出现,导致了传感器、视觉和分析技术的迅速发展,使机器人能够实时感知并对其环境做出适当的反应。
移动机器人采用各种运动方法。它们可能是地面的、水面的或空中的。地面机器人可以使用轨道、车轮或腿。移动机器人中增长最快的部分是自主移动机器人(AMR)。AMR可能只包括一个自主移动平台或基地,它可以装载货物进行运输。它也可能有一些附件,如能实现额外功能的货叉。或者它可以是一个完整的移动系统,包括一个移动基地、用户界面和定制功能。带或不带附件的移动基地在制造业、物流业和医疗保健业中占主导地位,用于在工厂、仓库和医院周围运输物料和包裹。它们或者取代自动导引车(AGVs),或者作为AGVs的补充使用,AGVs依靠导引路径和其他外部标记进行导航,不能绘制自己的路线。AMR则可以绘制其环境地图(或在预先提供的地图上进行更新),并在其中定位,能感知并应对障碍物--例如减速或停车--并且可以计划通往目的地的替代路线。大多数AMR用于室内环境诸如内部物流,是轮式的。工厂里的检查机器人可能是有腿的。
虽然AGV传统上在工业环境中运行,互动仅限于受过训练的人员,但AMR已经在工业环境和与公众接触的应用中工作,这些应用要么是有主动的(如信息机器人),要么是无法避免的(例如,医院的送货和清洁机器人)。在零售和酒店业,完整的移动系统是最常见的,例如信息和盘点机器人。
定义
(1)自主移动机器人(AMR)
自主穿越指定操作环境的移动平台。这需要拥有避障和避撞的能力,通过传感器检测障碍物,并通过计算自由空间的无障碍路径而不是预定的路径来调整路径规划。带或不带附件或操纵器完整的移动机器人系统(平台、用户界面和定制功能),例如:
信息机器人
安全机器人
医疗保健机器人
(2)自动导引车(AGV)
自动移动平台,使用防撞技术沿着预定的导引路径(虚拟或物理)自动穿越指定的操作环境。
(3)移动机器人(ISO 8373)
能够在自己的控制下行走的机器人。一个移动机器人可以是一个带或不带机械手的移动平台。
(4)服务机器人(ISO 8373)
为人类或设备执行有用任务的机器人,不包括工业自动化应用(工业自动化应用包括但不限于制造、检查、包装和装配。生产线上使用的关节型机器人属于工业机器人,而用于供应食物的类似关节型机器人则属于服务机器人)。
关于移动机器人应用和供应商的全面概述,可在IFR的世界机器人服务机器人报告中找到。本文的其余部分特别关注AMR在采用这些机器人的主要行业中的应用。我们回顾了AMR的基础技术以及AMR在不同行业领域的现有和未来的商业应用。在简要介绍考虑采用AMR的公司的考虑因素之前,我们概述了当前移动机器人安全标准的发展。
机器人技术中的移动性简史
自主移动性的第一个里程碑来自由英国生理学家W.Grey Walter在20世纪40年代末开发的两个AMRElma和Elsie机器人,用来模拟和研究大脑中的电信号。这些机器人可以检测并向光源移动,避开路上的障碍物。
第二个里程碑是1956年的达特茅斯会议(达特矛斯夏季人工智能研究计划(英语:Dartmouth Summer Research Project on Artificial Intelligence)由约翰·麦卡锡等人于1956年8月31日发起,旨在召集志同道合的人共同讨论“人工智能”会议持续了一个月,基本上以大范围的集思广益为主。这催生了后来人所共知的人工智能革命。),他们聚集了当时卓越的人工智能研究人员。主要关注的是模仿人类智能的机器,其中移动性起着关键作用。在1960年代末和1970年代初,一系列用于研究目的的移动机器人相继问世。
基于视觉和导航技术的商业应用的开发,是机器智能研究的一部分,科学家为此花费了更多时间。AMR--一种能够规划并执行自己的路径到达目的地的机器人--的最早例子之一是HelpMate,一种自主机器人,由Transitions研究公司在20世纪80年代开发,该公司由被广泛称为"机器人之父"的Joseph Engelberger创立。HelpMate机器人被开发用于医院,用于运输物料。
二、硬件和软件的发展所带来的新功能
硬件和软件
硬件和软件的快速发展使AMR具有以下功能;
自动性
AMR的自主性主要与导航有关。AMR可以在工厂和仓库中导航,而不必遵循固定的指导路径,当遇到障碍物时就会停止,并在飞行中重新规划其路径。
传统的工业机器人根据预先定义的程序执行任务,确保非常高的精度和速度,但对周围环境或机器人的内部状态没有任何了解或适应。
移动机器人需要能够在具有高度不确定性的环境中有效和安全地工作。不确定性。这通常是通过开发对来自传感器数据的输入作出适当反应的模型来实现的。例如,如果一个物体距离小于x厘米就停止。机器人的算法需要与不确定的外部环境打交道的机器人的算法正以非常快的速度发展,允许越来越高的自主性。在一个"基本"(但实际上仍然是高度复杂)的水平上,移动机器人可以从A地导航到B地,如果遇到障碍物则重新规划路线。许多研究目前正在进行为机器人提供"语义智能",即理解它所看到的东西。这反过来又使它能够做出适当的反应。语义智能主要依赖于概率性的算法,实时计算现有信息的最佳行动方案。例如例如,一个AMR遇到一个运动中的人,可能会看到这个人在一个标有"A "的门附近。
“Toilet",因此对该人打算去该门的方向的概率评价很高。从而使它能够适当地重新安排自己的路线。

双臂自主移动机器人,图片来源:ABB
在机器人与其他机器和软件沟通的自动化场景中,概率模型可用于确定哪种行动。过程中,概率模型可用于确定根据实时环境,以何种顺序采取何种行动。例如,机器人最初可能被指示将一个零件带到一个加工单元。例如,机器人最初可能被指示将一个零件送到一个加工单元,但当它收到该加工单元的生产情况时,将改变任务。但当它收到该加工单元的生产目前落后于计划的信息时,就会改变任务。机器人算法方面的这些进展正在迅速扩大AMR可以执行的任务范围。
在未来5到10年内,AMR可以执行的任务范围将继续扩大。越来越多的自主权的概念通常会引起人们对人类--或物体--的安全问题的关注。在移动机器人的路径上或与之直接接触的物体的安全。如果我们不知道机器人会做什么、要做什么--因为它能够在没有人类输入的情况下,临时决定自己的行动路线--我们怎么知道它是安全的?我们怎么知道它是安全的?这里需要注意的是,一个AMR应用是由多种算法混合而成的。算法,既有确定性的(如果是X,就做Y),也有概率性的(根据我所掌握的信息,什么最可能是真的?我所拥有的信息,以及什么是最合适的行动来实现我的目标)。并应用一个层次结构来确定哪一个具有优先权。
例如,一个确定的算法说明"如果物体距离小于x厘米,则停止",应该总是优先于任何概率性算法。确定性的算法提供了可靠性。因此,安全可以被"硬连接"到高度自主的移动应用中。这是为了满足安全标准的要求。这些算法也应该始终在机器人本身的本地运行,确保在网络中断或安全漏洞的情况下,机器人仍然能够安全运行。
2025-10-27 12:40
2025-10-27 11:39
2025-10-27 10:09
2025-10-27 10:08
2025-10-27 10:07
2025-10-27 10:06
2025-10-27 10:05
2025-10-27 10:04
2025-10-25 11:16
2025-10-25 11:15























 粤公网安备 44010602004352号
粤公网安备 44010602004352号