
优必选大型伺服驱动器特点
这些大型伺服驱动器,分别应用在Walker的肘部、上臂、肩部前向、髋部前向、踝部前向等关节上,以此实现平稳快速的行走和灵活精准的操作。

面对这么多性能指标的伺服驱动器,在做机器人的时候,到底该怎么选择呢?根据三种不同的应用场景,来看一下伺服驱动器的选型指标及排序吧!
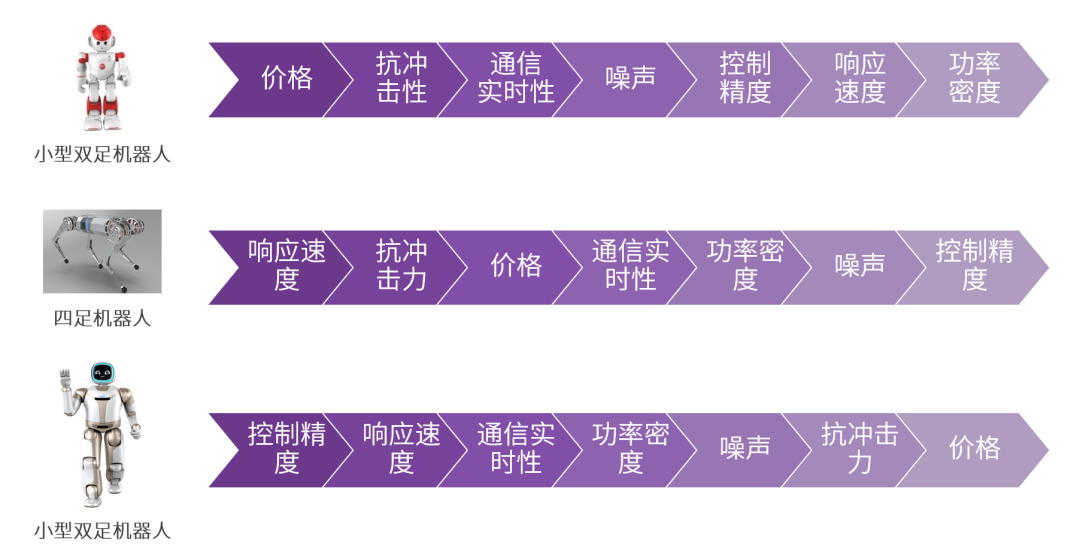
伺服驱动器的选型指标
桌面型的小型双足机器人,往往需要大批量的量产,因此性价比是非常敏感的要素;对于四足机器人来说,响应速度、抗冲击力、价格的指标要求比较优先;大型双足机器人的要求则要高一些,特别是控制精度、响应速度、通信实时性等。
未来研究方向
随着近几年消费机器人的热潮,不同机器人对伺服驱动器的要求也越来越高,在电驱伺服驱动器的方向,仍有不少改进空间,比如减小体积、外观流畅、提升功率密度,以达到跑和跳的动作需求。
双自由度设计也是方向之一,把两个自由度做在一个伺服驱动器里,同时产生两个垂直的输出,例如髋部,可以把前后的运动和侧向的运动做成一体,以此来节约体积和重量。此外,还有IMU惯导功能的伺服驱动器、多圈旋转模式(中空滑环设计)、具有刹车/离合功能伺服驱动器、具有弹性储能装置的伺服驱动器、新材料(如碳纤维)使用等,也是未来的重点研究发展方向。
伺服驱动器作为核心技术的布局之一,未来,优必选科技仍会继续更深的挖掘和技术的积累,致力让人工智能推动全产业发展,让智能机器人走进千家万户。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号