
左右滑动查看更多>>
· 软件算法
不管是伺服驱动器,还是伺服电机,伺服算法大部分都是基于电机的矢量控制来扩展来进行使用的。
优必选科技的伺服软件算法提供丰富控制接口,包括高精度位置传感器、PID参数控制、各种保护机制、控制模式等,全面保护伺服驱动器的安全可靠运转,灵活应用于各种场合。
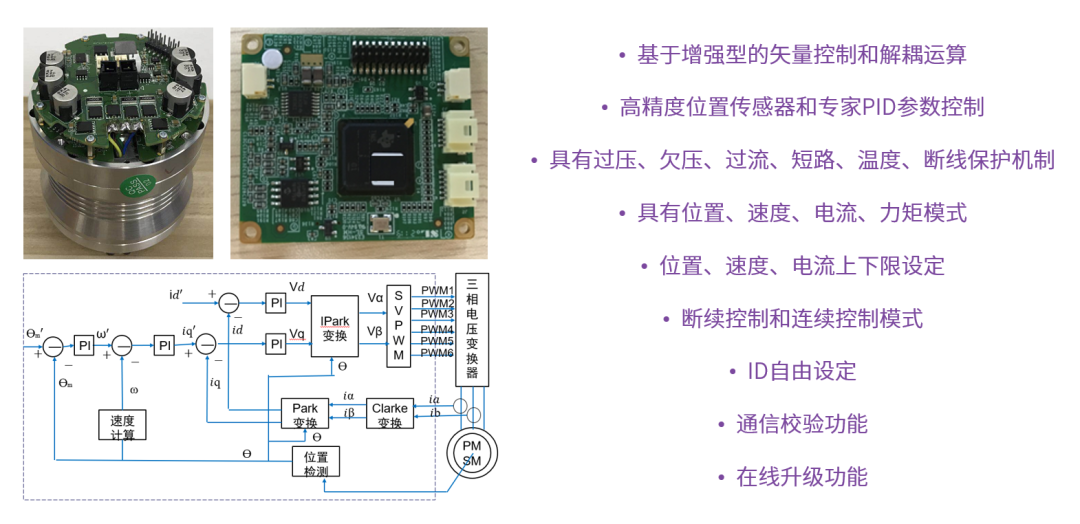
优必选科技伺服软件算法功能齐全
· 电磁制动器
电磁制动器有两种方式,第一种是转子刚性连接一个多辐条(片)装置,当电磁阀断电时,在弹簧的作用下,金属棒插入辐条之间的缝隙中,阻挡电机转子旋转;当电磁阀通电时,在电磁力的作用下金属棒收起,辐条可以跟随转子旋转。
第二种则是在上下两个金属中添加石墨片,当电磁抱闸通电吸合的时候,它对电机不制动;当断电时,抱闸就会在弹簧的作用下抱住电机转子产生制动。
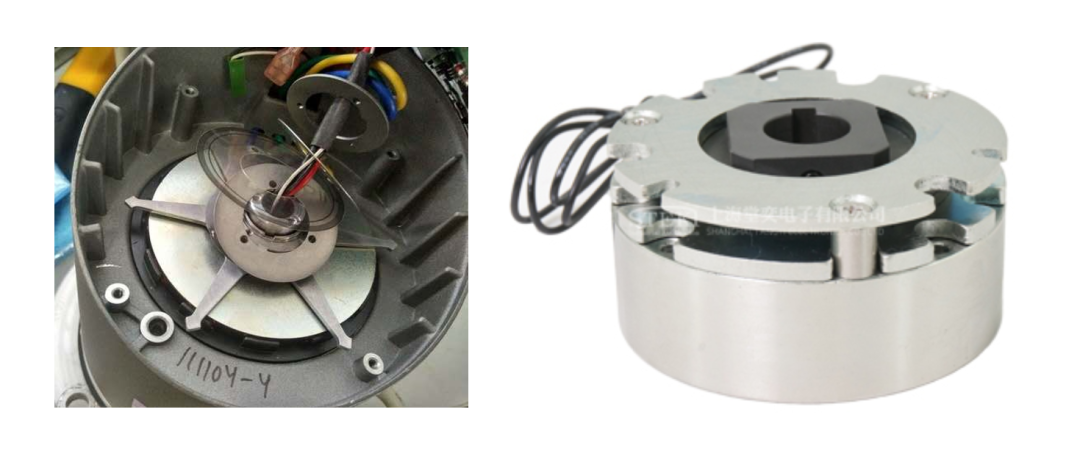
电磁制动器的两种方式
不管是哪种方式,当电磁制动器加入伺服驱动器后,在软件上一定要注意控制机制。因为在高速的情况下,如果直接把金属棒插入到辐条里,非常容易打坏伺服驱动器。
· 通信
目前通讯方式应用最多的有RS485,CAN,EtherCAT等,具体选用哪一种方式,就要考虑伺服驱动器在不同机器人中的应用场景。

· 中空设计
一般的家庭应用或者服务机器人,不可能像工业领域那样在外部走线,因此伺服驱动器做成中空设计,简化外部结构,是最方便的。如果中空结构加上滑环设计,就可以实现伺服驱动器的多圈输出。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号