什么是伺服驱动器
人的运动系统,分别由骨骼、关节、肌肉构成,因骨骼位置的变化而产生运动。然而,骨骼本身是不能运动的,骨骼的运动主要靠肌肉牵引和关节转动。
伺服驱动器,就类似于人类肌肉的伸缩、牵引,是用来控制伺服电机的一种控制器,为机器人的运动系统提供着强劲动力。

伺服驱动器研究现状
随着近年机器人蓬勃发展,伺服驱动器已经得到广泛应用。目前市面上伺服驱动器的类型,包括了电驱、液压、线驱、气动,以及复合材料等形式。
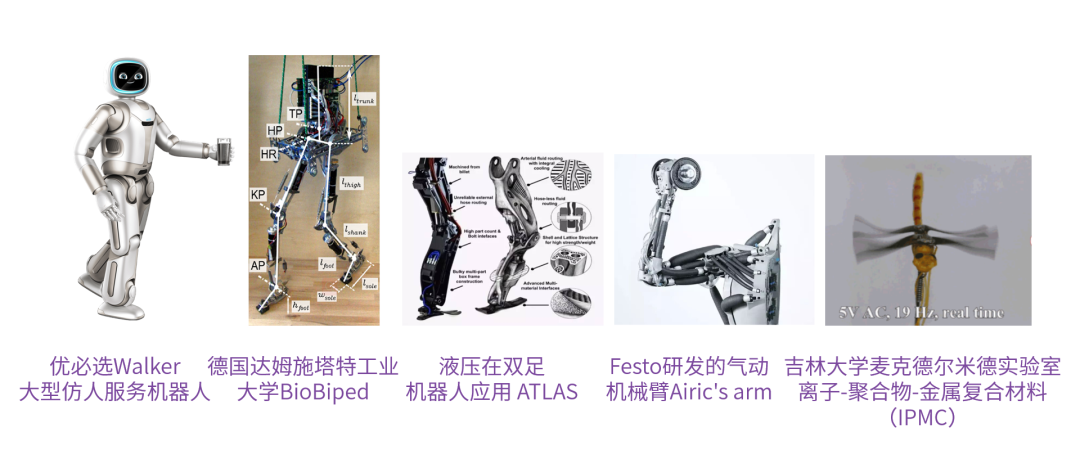
伺服驱动器的主要类型
综合来看,电驱型是目前发展最广泛、技术最成熟的方向。利用电机和轴承模拟人的关节,从而控制机器人稳定行走,是机器人通常的控制方式。本期课题也将围绕这个方向展开。
电驱型伺服驱动器
· 基本构成
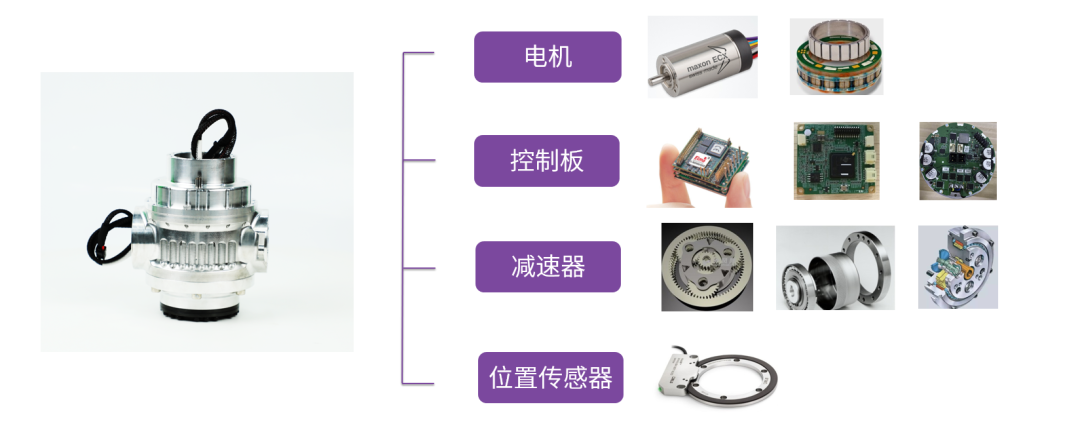
伺服驱动器的基本硬件构成,主要有电机、控制板、减速器、位置传感器,它们通过执行接收到的通信信号控制输出端的旋转角度,不管是什么样的产品类型和力矩大小,这四种基本组成都不可缺少,是机器人实现灵活运动的关键所在。
· 功能原理
伺服驱动器通过不同方向的组合,就成了机器人的“关节”,决定着机器人的运动方向,也就是经常听到的机器人“自由度”。比如Walker有36个伺服驱动器,就是有36个自由度。
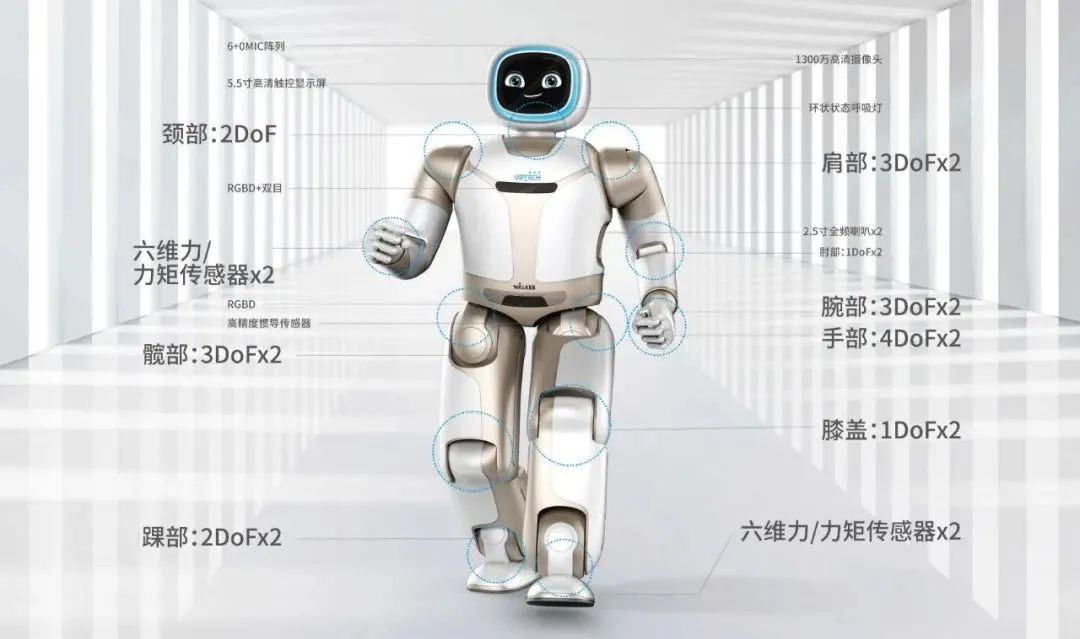
Walker全身具备36个高性能伺服关节
要想实现机器人的精准运动,每个关节需要产生精确的输出位置和力矩。当伺服驱动器接收到主控的位置命令后,可以实时响应命令,多个舵机协调运行,就可以产生犹如人类一般灵活的运动。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号