工业机器人的核心技术发展主要有两个:一为智慧感测,二为运动控制系统。智慧感测的应用,使得机器人不只是僵硬的机械,而能具备人的灵活度与应变能力,机器人因此能依据条件选择完成任务的最佳路径、并在复杂的变化中做出不同调整。未来若结合软体发展,机器人也会越来越灵活、具备更加强大的功能。
另一个发展方向,则在於运动控制系统的改良与研发。在机器人运动学里,考量的参数中除了速率、加速度与准确度等物理指标,还有一个重要的参数-“轴数”,轴数代表了机器人在空间中运动的自由度,类似於人类的关节。平面运动如果有两个运动方向就需要两个轴、若同时具备x、y、z轴的运动方向就需要三个轴-轴数越多,代表其灵活度越高。运动控制系统便是运用了上述的运动原理,来模拟人类的上肢与下肢运动。在其中,模仿上肢的机器人以实施多维运动来辅助工业制程,常见为焊接用的机器人;模仿下肢的机器人则多用於物料的搬运与输送。
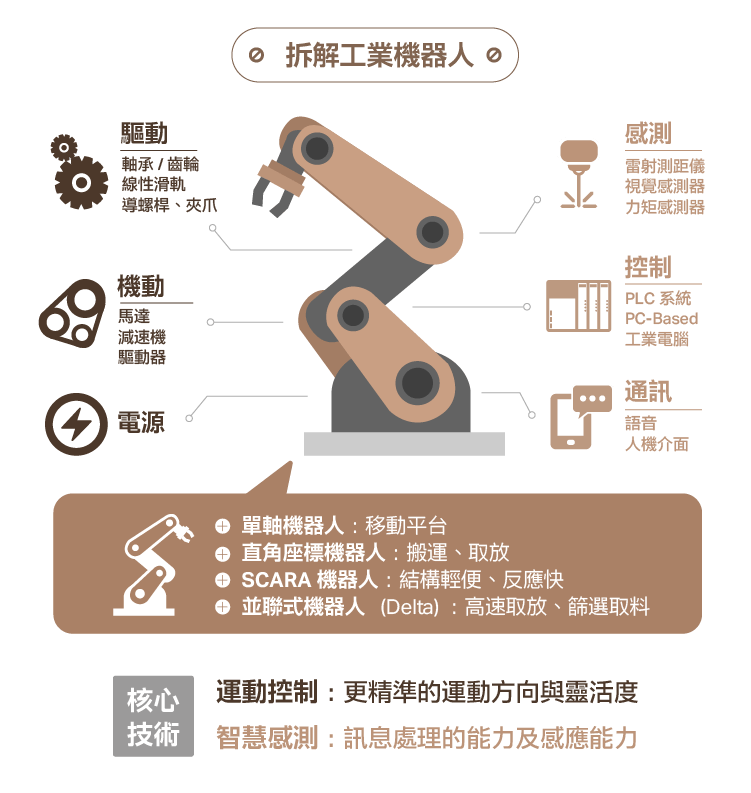
而依据应用区块的不同,机器人会有不同的运动方式,通常在生产线上工作的机器人,由於所需运动方式较为单纯,不会有超过六个以上的轴。可分成下列几种:
单轴机器人——以滚珠螺杆及线性滑轨构成,由马达驱动的移动平台,运动形式单纯,是最先开始的发展机种,在自动化产业应用广泛;
直角座标机器人——以三轴堆叠配合直线运动来操作,多用於搬运、取放;
SCARA机器人——以四轴(x、y、z三轴的平动自由度+z轴的转动自由度)的运动方式,适於装配、搬动和取放物件,结构轻便、反应快,多用於电子、3C产业;
并联式机器人(Delta)——多用於需高速取放、筛选取料的产业,如:食品业及电子检料等。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号