
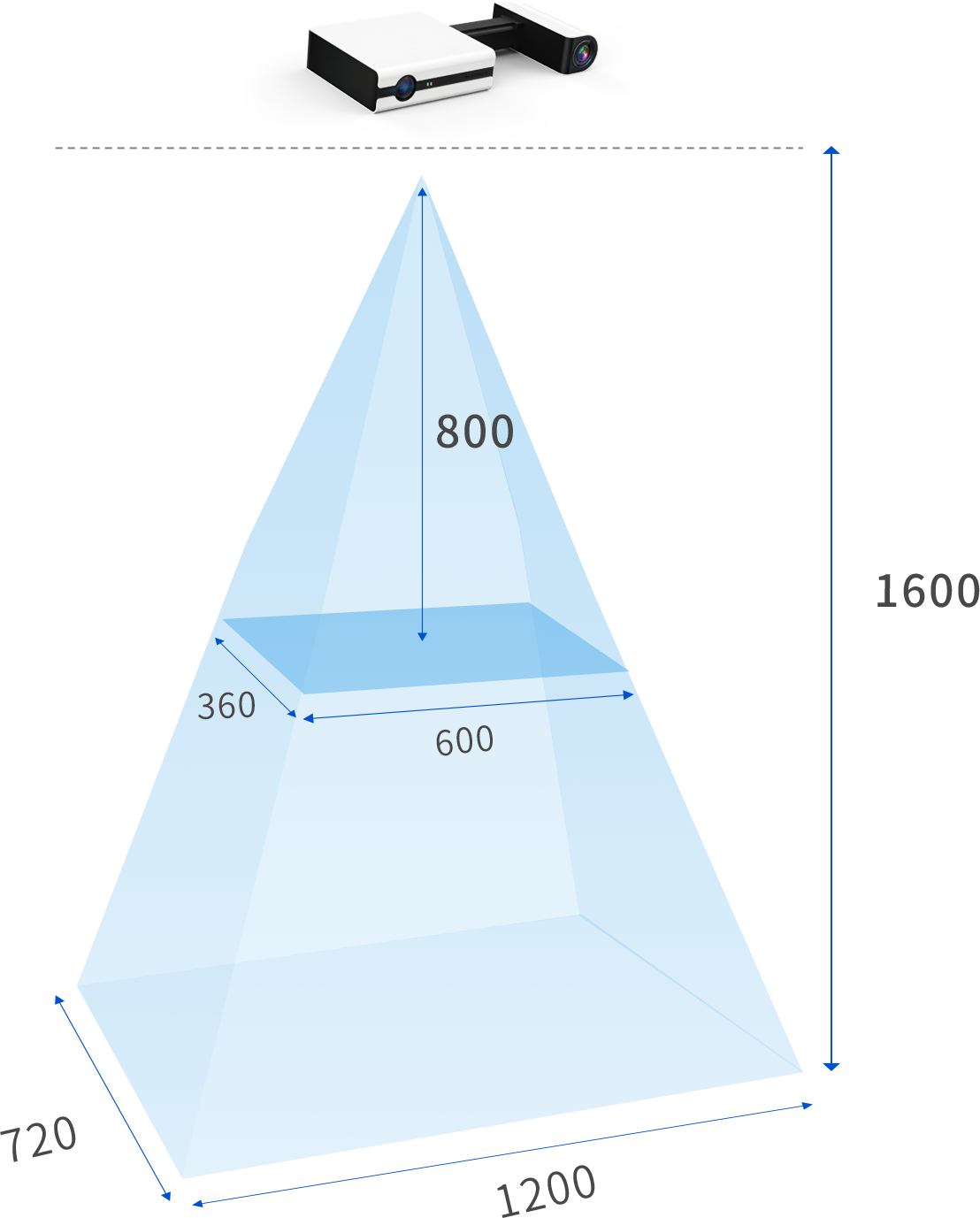
H0232/0242将高精度的3D结构光技术与智能AI算法融合,适用于0.8-1.6m距离的3D物品扫描,可辅助机械臂实现无序分拣、拆码垛、上下料等应用,广泛适用于精细化生产企业。
产品特性
可开源算法,简便易用
提供SDK,方便调用并部署典型应用
全新3D重建计算抓取点,辅助抓取
准确的识别抓取中心点和姿态,提升抓取稳定性
高清3D数据
精度可达0.1mm,实现可靠的环境感知
产品详情参数
| 工作原理 | 编码结构光技术 |
| 分辨率 | 1920*12000 |
| 采集时间 | ≈0.4s |
| 输出格式 | Depth&Amplitude Map |
| 距离范围 | 0.8m~1.6m |
| 精度 | ±0.1mm@1m |
| 功耗 | 20W@12VDC |
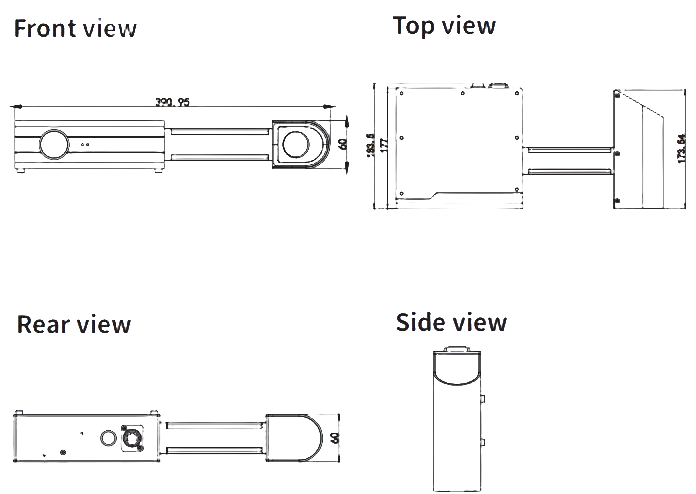
| 尺寸 | 390mm×181mm×60mm |
| 重量 | 3500g |
| 供电方式 | 12V DC 3A |
| 通讯接口 | RJ45(以太网) |
| 防护等级 | IP54 |
| 工作温度 | 0℃~50℃ |
| 存储温度 | -20℃~ 60℃ |
| 软件环境 | C/C++/C# |
| 操作系统支持 | Windows7/8/10/11,Linux |
产品尺寸
产品视野


















")

 粤公网安备 44010602004352号
粤公网安备 44010602004352号