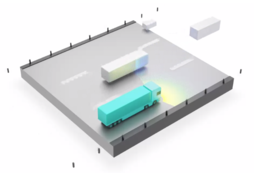
自动驾驶汽车配备了多种传感器——摄像头、激光雷达、雷达等。它们会产生大量数据,这些数据必须为各种感知任务做好准备。这包括传感器数据的适当过滤、合并和时间同步。此数据通常表示为 3D 点云或图像。
通过完整的感知管道确保最小延迟非常重要。我们的算法作为具有标准化接口的构建块,用于您的定制管道——确保最小延迟、实时功能和可靠操作。














")

 粤公网安备 44010602004352号
粤公网安备 44010602004352号