产品简介
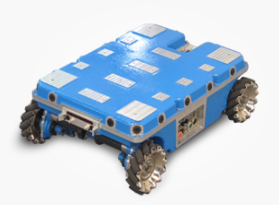
Navigator系列机器人平台,是高性能与高可靠性产品的代表。采用工业级产品的设计理念,旨在为用户提供一个完整的、高性能、高可靠性、接口丰富、简单易用、严格防护等级、能够长期不间断工作的机器人系统。Navigator Q2是四轮45度全向轮轮系的机器人平台,使用航发公司的QMA-15全向轮,与传统轮系相比,能够实现平移、自转、平移并自转等特殊运动。平台底盘采用整体铝合金铸造成型工艺,并具有液压避震悬挂系统,使用四台大功率的空心杯电机作为驱动,并配有独立的伺服驱动器,高阶运动控制器集成了多种运动控制功能,支持CAN总线及RS232接口。开发包向用户提供完整的设备通信协议以及基于STM32F407的示例与演示程序源码,使用户能够对Navigator Q2快速上手。
特性
全方向自由移动铝合金整体成型底盘液压阻尼避震,四轮独立悬挂工业级全向轮空心杯直流伺服电机伺服驱动器多功能运动控制器DEMO开发板及应用代码
外形尺寸

规格参数
| 机身形式: | 铝合金一体成型 | 外形尺寸: | 672×481×241 |
| 驱动轮: | QMA-15全向轮 | 驱动轮直径: | 152.4mm |
| 驱动方式: | 四轮独立驱动 | 悬挂形式: | 液压阻尼避震器悬挂 |
| 车身最小离地间隙: | 73 | 整机重量: | 32kg |
| 额定负载能力: | 50kg | 电机类型: | 空心杯直流伺服电机 |
| 电机额定功率: | 90W | 电机编码器: | 500线/转,A、B相输出 |
| 电机数量: | 4 | 电机驱动: | 伺服驱动器,CAN总线、RS232通信接口 |
| 最大移动速度: | 1.2m/s | 最大自转速度: | 145°/s |
| 最小转弯半径: | 0m | 适应的地形: | 室内、室外坑陷较少的水泥及沥青路面 |
| 典型续航时间: | 约10h(负载10kg,运行速度1m/s,运行率70%) | 待机时间: | >30h |
| 车载电源输出: | 5V@5A / 12V@5A / 电池电压(22.4~29.2V)@>10A | 电源保险管预设规格: | 5×20/20A |
| 电池: | 24V/18.2Ah锂离子电池 | 电池快速更换: | 支持 |
| 充电器: | 输入:AC220V~240V / 充电电流:5A / 接口:直插式 | ||
| DEMO开发板: | RHF407开发板(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,ADC×8,DAC×2,PWM×8,LED×2,按键×2, 独立I/O×24,可复用I/O×29,TF卡接口×1,RTC后备电池座,可复用TFT LCD接口×1) | ||

















")

 粤公网安备 44010602004352号
粤公网安备 44010602004352号