近日,马路创新宣布其自主研发的独立VSLAM定位导航技术实现新突破,并成功落地多个业务场景,标志着马路创新率先跨入VSLAM2.0时代。
VSLAM 2.0 采用业内独创的全环境感知技术,通过算法优化实现了单图150KM的超大范围行程定位,进一步优化了SLAM技术在实际应用中的表现效果。同时更高的定位鲁棒性将帮助智能移动机器人在复杂工况下的稳定应用,助力企业客户在工业4.0的道路上迈出坚实的一步。
VSLAM定位导航
定位导航技术是移动机器人关键底层核心技术。相较于磁条、QR码等需要安装辅助定位措施的导航方式,SLAM(simultaneous localization and mapping 中文意为“即时定位与地图构建”)导航方式使得机器人可以像人一样识别周边环境,从根本上摆脱了对外部环境的依赖,使得机器人能够在更广范围内活动,同时,人工智能的应用也使得机器人具备更好的定位柔性以及更强的稳定性。
按照传感器的分类,业内通常将SLAM分为激光SLAM和视觉VSLAM。
激光SLAM:从早期利用反光板的三角定位方式开始,激光SLAM通过激光LiDAR传感器,扫描周围环境中的物体,对不同时刻的不同定位信息进行对比计算出相对距离,完成对机器人自身定位。
视觉VSLAM:利用视觉摄像头拍摄周围的图像,通过图像识别技术,采集图像中物体位置的信息,将不同时刻不同位置中,环境物体与机器人的相对位置联系起来,实现机器人的自主导航定位功能。
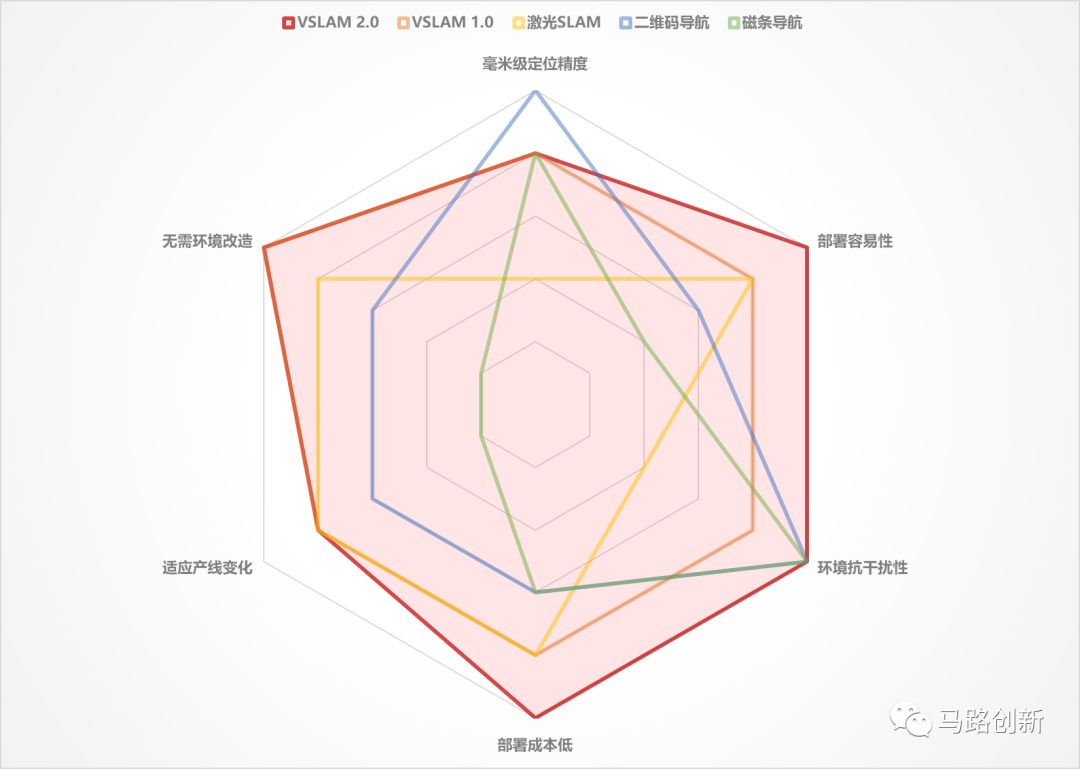
(常见定位导航方式的六维雷达对比图)















 粤公网安备 44010602004352号
粤公网安备 44010602004352号