在自动驾驶、行星探测、农业巡检等真实户外场景中,多模态传感器(如 LiDAR 与相机)的外参标定(即确定两者之间的空间变换关系)至关重要。然而,这些系统一旦部署,就面临两大现实挑战:
传感器漂移:温度变化、剧烈震动会导致传感器位姿偏移;
目标与传感器污染:泥沙、划痕、模糊镜头等会严重干扰传统标定方法。
传统标定依赖棋盘格、平面板等结构化目标——但在野外,它们要么太大难以携带,要么极易被遮挡或损坏。更关键的是,现有方法几乎从未同时考虑“目标损坏”和“传感器退化”的双重干扰。
论文链接:https://arxiv.org/pdf/2507.17130
项目主页:https://sparolab.github.io/research/marscalib/
01
创新方案:用一个“小球”搞定多机器人自动标定
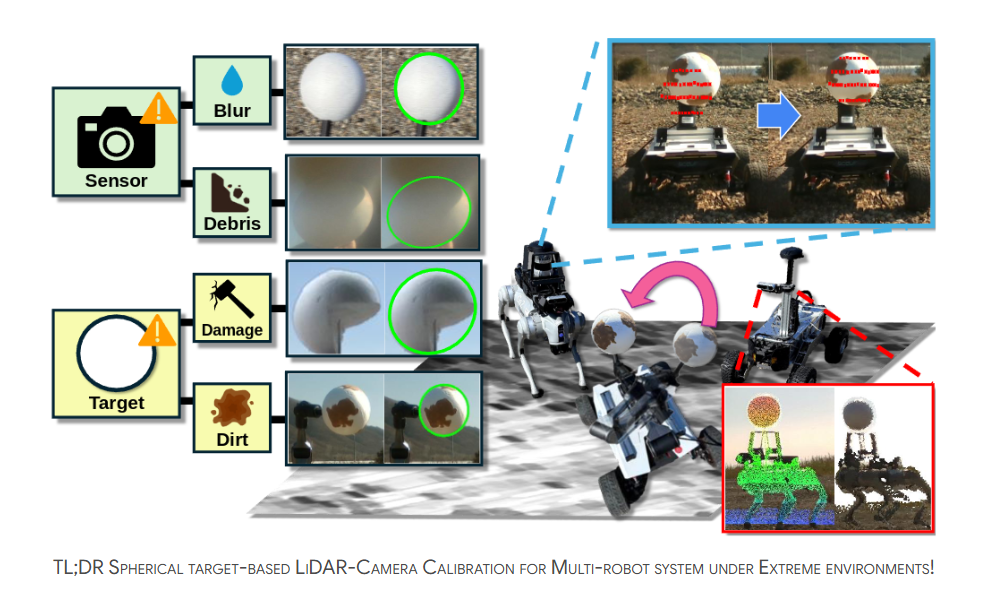
研究团队提出了 MARSCalib:通过“小球+智能感知+多机协作”范式,实现了面向真实世界的全自动外参标定。
极简标定物——仅需一个10cm泡沫球
采用白色泡沫球作为唯一标定目标,半径仅 10 cm(当前文献最小);
轻便、低成本、无方向性,便于机器人携带或部署;
即使被泥土覆盖、部分切割或镜头模糊,仍能有效工作。
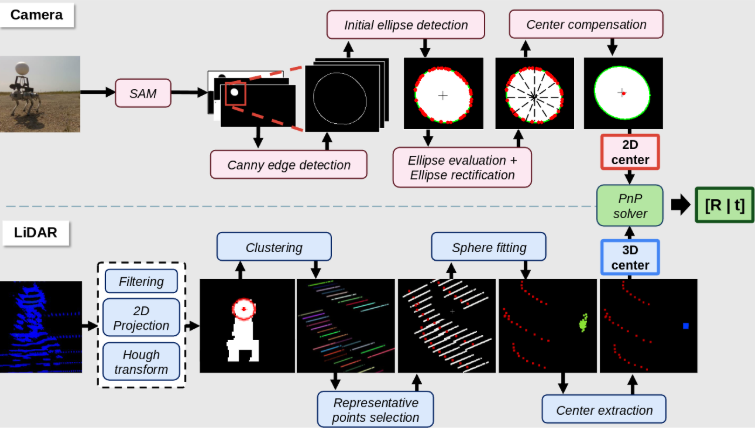
抗干扰感知 pipeline
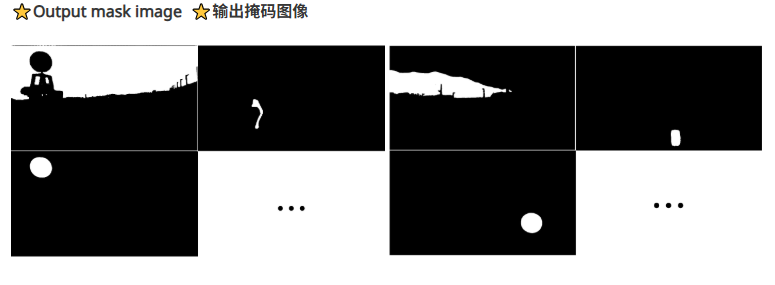
相机端:结合 SAM(Segment Anything Model) 与 Canny 边缘检测,自动定位球体区域,并通过椭圆迭代修正消除污染影响;

LiDAR 端:提出分层加权点云采样策略,剔除高方差点簇,保留稳定几何结构,稳健拟合球心;
联合优化:基于 PnP + 鲁棒核函数,最小化重投影误差,抑制异常匹配。
多机器人全自动协作
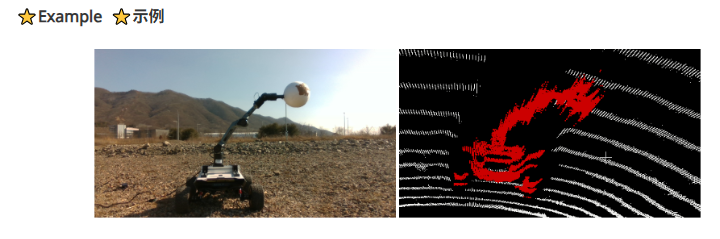
无需人工干预:一台机器人持球静止,另一台环绕采集数据;
支持异构传感器组合,已在 Ouster、Livox、SOSLAB 三类 LiDAR 上验证通用性。
02
实验验证:精度与鲁棒性双优
研究团队在模拟月球地形与城市建筑工地两类复杂环境中开展测试:
| 指标 | 表现 |
| 平均平移误差 | < 0.03 m |
| 平均旋转误差 | < 0.5° |
| 重投影误差 | < 2 像素 |
| 目标污染容忍度 | 球体缺失25% 或重度污损下仍成功标定 |
| 对比方法性能 | 显著优于 AprilTag、CopperTag 及 Tóth et aI |
特别值得注意的是:在 Livox Avia(非重复扫描 LiDAR)上,MARSCalib 依然保持高精度,证明其对非规则点云分布具有强适应能力。
03
应用价值:从火星到农田的广泛潜力
尽管以“MARS”命名,MARSCalib 的应用场景远不止行星探测:
深空探测:火星车在尘暴后自主重标定,保障长期任务可靠性;
工业巡检:核电站、矿山等高危环境中,多机器人协同完成免维护感知系统部署;
低资源 SLAM:为低成本移动机器人提供“自愈”能力,降低运维门槛。
MARSCalib 不仅是一项技术改进,更代表了一种面向真实世界的设计哲学:
“不是让环境适应算法,而是让算法适应环境。”
通过放弃对“完美标定板”的依赖,转而拥抱简单、鲁棒、可容错的物理目标与智能感知策略,该工作为未来长期自主机器人系统提供了关键基础设施。
松灵机器人成立于2016年,是全球领先的机器人底盘制造商和移动机器人系统解决方案服务商。目前,松灵机器人已经拥有多款适用于不同地形的室内外移动机器人底盘,在载重、续航、速度、运动模式等不同需求场景下实现全矩阵覆盖。同时,松灵机器人还推出了自动驾驶解决方案,平行驾驶解决方案,机器人科研教育套件等移动机器人底盘配套产品,帮助客户在自动驾驶、机械控制、计算机、车辆等领域完成实验验证。
凭借领先的研发技术,松灵机器人已经与包括阿里巴巴、华为、本田、中建三局在内的30多家行业领军企业,以及中科院、清华大学、南方科技大学、北京理工大学、新加坡国立大学、纽约大学等国内外50多所顶尖学府开展了深度合作。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号