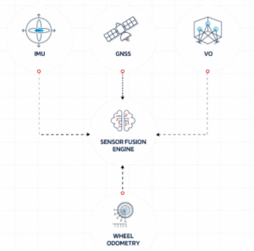
所有可用的传感器数据,例如 GNSS 观测、相机图像和 IMU 测量值都被输入 Fixposition 的深度传感器融合引擎。还可以添加轮速信息等辅助输入,以提高 GNSS 退化或拒绝区域的传感器性能。
融合引擎利用多种独立传感器技术的优势并弥补个别弱点以提供最佳姿态估计。
















")

 粤公网安备 44010602004352号
粤公网安备 44010602004352号