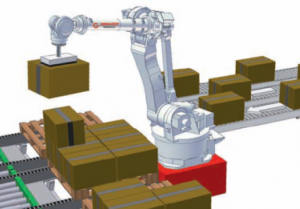
为了保证内部物流中货物的持久、灵活、高效和可靠的流动,自动导引车 (AGV) 是数字化和工业 4.0 时代的未来创新解决方案。这些提供了更高程度的自动化并解决了日益复杂的问题。这使得能够满足关于数量不断变化的产品、不断变化的生产条件以及及时提供货物的要求。因此,一方面可以实现较短的吞吐量时间和优化各个站的利用率,以实现高的整体可用性。在 AGV 的帮助下,一方面可以优化内部物料流,另一方面可以优化整个价值链。根据 AGV 的类型,不同重量的货物可以在仓库中自主移动。这就是为什么无人驾驶运输系统是未来内部物流的创新解决方案。

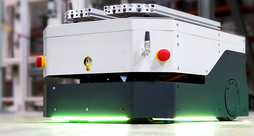
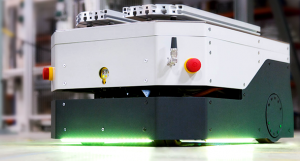
GEBHARDT Fördertechnik 的无人驾驶运输系统实现了内部物流领域未来的创新货物运输。他们自主和合作地执行后勤任务。所使用的 AGV 使用动态路线规划,这意味着流程模块是松散链接的。用于内部物流和装配的自主、智能和自组织车辆根据需要使用感应或光学车道引导进行导航,并由 RFID 传感器提供支持。它们安装在靠近导航车道的货叉、车站等前面的地面上,以便以 10 毫米的最大精度定位 AGV。此外,可以使用光学二维条码实现最大五毫米的定位精度。电感式变体是通过电缆测量磁场实现的,而光学导航则由基于摄像头的传感器系统执行。该传感器系统检测涂漆或粘合的导航线,对反射、太阳辐射和大厅照明不敏感。AGV 使用集成的安全扫描仪来独立检测障碍物,以便它们可以降低速度并停止。如果该路径被其他车辆占用,AGV可以切换到节能模式并报告该路径的占用。一旦路线再次畅通,AGV 将继续自动行驶。为确保无差错导航,建议联合使用多种技术。而光学导航由基于相机的传感器系统执行。该传感器系统检测涂漆或粘合的导航线,对反射、太阳辐射和大厅照明不敏感。AGV 使用集成的安全扫描仪来独立检测障碍物,以便它们可以降低速度并停止。如果该路径被其他车辆占用,AGV可以切换到节能模式并报告该路径的占用。一旦路线再次畅通,AGV 将继续自动行驶。为确保无差错导航,建议联合使用多种技术。而光学导航由基于相机的传感器系统执行。该传感器系统检测涂漆或粘合的导航线,对反射、太阳辐射和大厅照明不敏感。AGV 使用集成的安全扫描仪来独立检测障碍物,以便它们可以降低速度并停止。如果该路径被其他车辆占用,AGV可以切换到节能模式并报告该路径的占用。一旦路线再次畅通,AGV 将继续自动行驶。为确保无差错导航,建议联合使用多种技术。该传感器系统检测涂漆或粘合的导航线,对反射、太阳辐射和大厅照明不敏感。AGV 使用集成的安全扫描仪来独立检测障碍物,以便它们可以降低速度并停止。如果该路径被其他车辆占用,AGV可以切换到节能模式并报告该路径的占用。一旦路线再次畅通,AGV 将继续自动行驶。为确保无差错导航,建议联合使用多种技术。该传感器系统检测涂漆或粘合的导航线,对反射、太阳辐射和大厅照明不敏感。AGV 使用集成的安全扫描仪来独立检测障碍物,以便它们可以降低速度并停止。如果该路径被其他车辆占用,AGV可以切换到节能模式并报告该路径的占用。一旦路线再次畅通,AGV 将继续自动行驶。为确保无差错导航,建议联合使用多种技术。AGV 使用集成的安全扫描仪来独立检测障碍物,以便它们可以降低速度并停止。如果该路径被其他车辆占用,AGV可以切换到节能模式并报告该路径的占用。一旦路线再次畅通,AGV 将继续自动行驶。为确保无差错导航,建议联合使用多种技术。AGV 使用集成的安全扫描仪来独立检测障碍物,以便它们可以降低速度并停止。如果该路径被其他车辆占用,AGV可以切换到节能模式并报告该路径的占用。一旦路线再次畅通,AGV 将继续自动行驶。为确保无差错导航,建议联合使用多种技术。
差速控制可实现转弯和原地转弯。自主运输系统的能量传输发生在感应导航路线上、感应充电站上或通过触点进行。感应充电的优点是系统免维护、无磨损,因此可以实现无障碍路线。还内置了一个额外的能量存储设备,以确保 24/7 全天候运行。这种存储器可以用超级电容器或铅晶蓄电池来实现。超级电容充电时间短,使用寿命长,而且免维护。铅晶电池能量密度高,可以使用很长时间,直到下次充电。它们也非常坚固耐用,

由客户操作的上位物流计算机通过物流控制器连接到车辆管理、路线管理、能源管理等,并通过包括UDP(User数据报协议)。
无人驾驶运输系统通过用户敏感的屏幕进行操作。这使得可以通过操作员界面直接在现场查询 AGV 的状态或错误。也可以通过界面手动控制车辆。
无人驾驶运输系统存在三种不同的版本,以 1.5m/s 的最大速度运输从 350kg 到 3000kg 的负载。通过组合标准化组件,自主运输系统可提供各种设计。
| 车辆类型 | AGV-850.01 | AGV-860.01 | AGV-865.01 |
| 最大负载 [kg] | 350 | 1,500 | 3,000 |
| 空重kg] | 320 | 785 | 1,000 |
| 尺寸 [毫米] | 845 x 600 x 415 | 1,400 x 980 x 337 | 2,110 x 830 x 400 |
| 最小曲线半径 [m] | 1 | 1 | 1.5 |
| 速度[米/秒] | 1.5 | 1.5 | 1 |
| 加速度 [m / s²] | 0.5 | 0.5 | 0.5 |
| 能量充电 | 基于联系人 | 接触式 感应 | 接触式 感应 |
| 储能 | 铅晶电池 | 铅晶蓄电池 超级电容器 | 铅晶蓄电池 超级电容器 |
| 导航 | 光学上 | 光 感 | 光 感 |
| 定位 | +/- 10 毫米通过 RFID +/- 5 毫米通过二维条码 | +/- 10 毫米通过 RFID +/- 5 毫米通过二维条码 | +/- 10 毫米通过 RFID +/- 5 毫米通过二维条码 |
| 沟通 | 使用UDP协议的WiFi | 使用UDP协议的WiFi | 使用UDP协议的WiFi |
| 承重 | 升降 台滚筒 输送带式输送机 | 带100mm行程 滚筒 输送链输送机的升降台 | 80mm行程的升降台 |
















")

 粤公网安备 44010602004352号
粤公网安备 44010602004352号