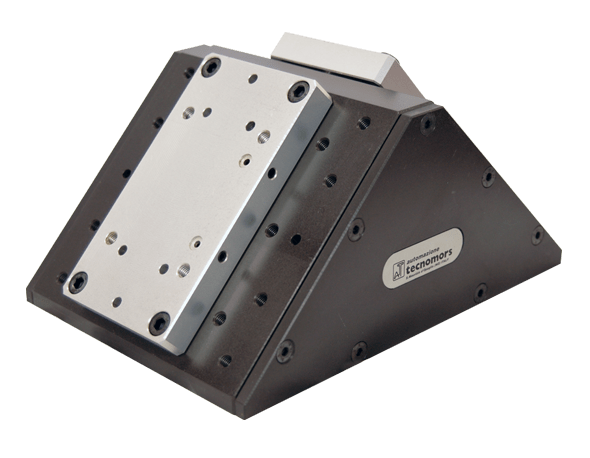
双抓手支架SR
设计了不同型号的支架,可以同时将两个抓爪安装在机器人或机械手上。
这种支持使机床联锁和机器人装卸变得更加容易。
优点
这些支撑件的主要特征是:内部进给和夹具的接近开关电缆的组件集:
nr.2夹持器驱动电动阀,通过电动和气动有线方式固定在支架上
nr。1个多极连接器(19针),与内部组件连接,可进行组件进给和:夹具电动阀进给,夹具位置控制开闭
nr.1多极连接器(6极)与接近开关
连接此连接器仅与主要连接器(19极)布线。如果系统仅具有一个空气连接和一个多极连接器,则使用该设备还可以送入和控制两个抓爪。因此,您只需要将液压进料管和电气信号电缆连接到机器人或机械手即可。最大的优点是简化了所有连接。














")

 粤公网安备 44010602004352号
粤公网安备 44010602004352号