

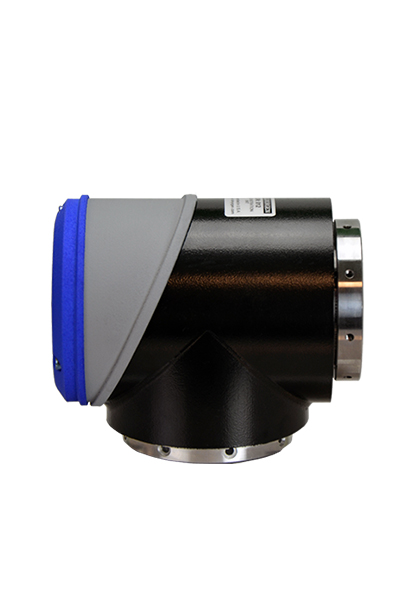
● 科尔摩根RGM关节模组
48VDC 供电
采用专业设计的新型无框架直驱力矩电机
4种谐波减速器规格,方便选型
双反馈系统,包含电机换相用增量编码器,减速机输出端用单圈绝对值编码器
集成专用紧凑型低压直流驱动器
采用断电式制动器,由内驱电子部件控制
●选件
机器人末端执行器的标准工具安装选项,包括标准机械接口和电气接口
基于CANopen通讯协议的驱动器,计划增加EtherCAT通讯协议选项
● 优点
采用全新高性能无框伺服电机,结合专用谐波减速器,发挥最优效率并保障高质量稳定运行
最大扭矩达到谐波减速器的峰值性能
实现更大的连续转矩输出,同时有效控制电机温升和谐波减速器温升,保障整体使用寿命
L形外壳,方便与底座和手臂安装连接
● 同毅关节模块方案(定制化开发)
● 关节模块驱动XDRV
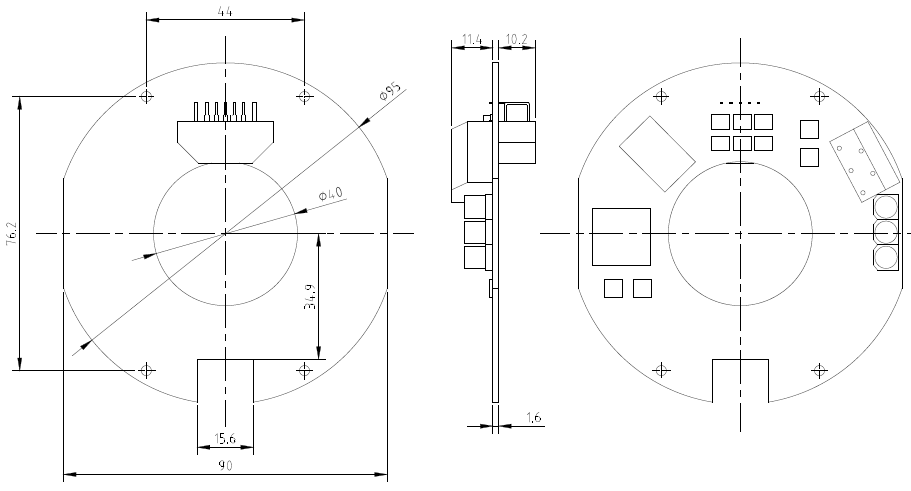
机械尺寸

功能参数
1. 驱动直流无刷电机,永磁同步电机或直流有刷电机。
2. 双编码器反馈,其中单圈绝对式编码器用于检测减速器输出端位置信号,编码器接口为SSI;增量式编码器用于检测减速 器输入端速度信号,接口为ABZ信号。
3. 设计输入电压为24VD或48VDC供电。
4. 设计输出额定电流10A,峰值电流30A。
5. 工作环境温度为0~50℃,工业设计标准。
6. 支持MODBUS总线通讯,CANOPEN总线通讯,标准 Cia301,Cia402协议,波特率可调。
7. 位置控制,速度控制,力矩控制多种模式,位置控制精度±1pulse,速度控制精度±0.02%。
8. S曲线,T曲线,PT模式,PVT模式
9. 具有安全保护,如过流,高温,编码器故障等检测与报警功能。
10. 具有数字量和模拟量输入输出功能。
11. 抱闸控制功能接口。
支持编码器
分离式增量式编码器
编码器采用5V供电,信号接口为标准ABZ信号,其中AB两个通道的信号一般是正交(即互差90°)脉冲信号。当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。从而由此判断主轴是正转还是反转。而Z相是零脉冲信号。
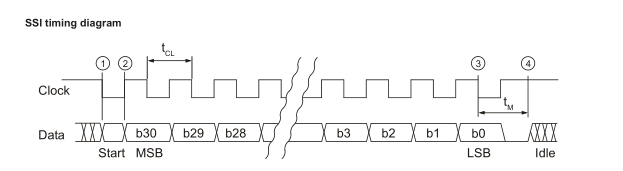
SSI绝对值编码器
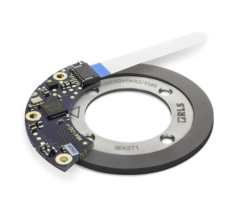
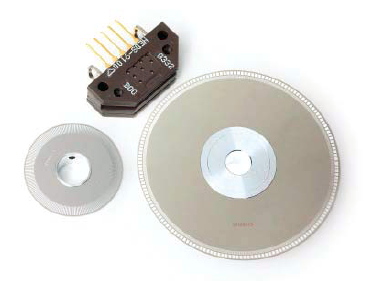
配合力矩电机














 粤公网安备 44010602004352号
粤公网安备 44010602004352号