AGV精度
当我们提到AGV的时候,经常提到某某AGV的精度是正负多少mm,这里一般都是指的AGV的重复位置精度,就是AGV多次到系统中同一个点位实际到达位置之间的偏差,这个是衡量AGV的一个重要指标。
要获取这个指标一般都是人工手动来进行测试,先是手动给AGV发送一个到点指令,AGV到达停止后手动进行地面参照标记,重复这个步骤多次后,手动来测量多次的偏差。比如类似下图这样,在AGV上找一个固定位置作为参考点,每次把这个位置在地面上做个标记。

在实际项目当中,有时候我们需要测量AGV在自动模式下长时间运行,多个坐标点的重复位置精度,坐标点之间的距离都会比较远,分布在整个地图的不同位置,这样测试的结果才会更能反映出实际情况。如果还是手动发到点指令,并人工在地上画线的话,就非常麻烦,耗费很多时间去做简单的重复工作。
现在如果是NDC系统的话,我们可以很容易的实现自动化测试,并且自动记录数据。这里我们和大家分享其中一个易于实现的方法。
首先是如何额外添加最少的设备最快的让AGV自动运行起来,按照我们指定顺序去到一系列坐标点。
如果我们想同时测试多个AGV的话,需要系统调度也就是System Manager来给AGV车队下任务并做交通管理,这样的话我们需要有一台电脑来运行System Mananger, 并需要进行相应的配置和简单编程,并且现场还需要有网络覆盖。就像正常的项目运行一样,我们这里就不做详细的描述。
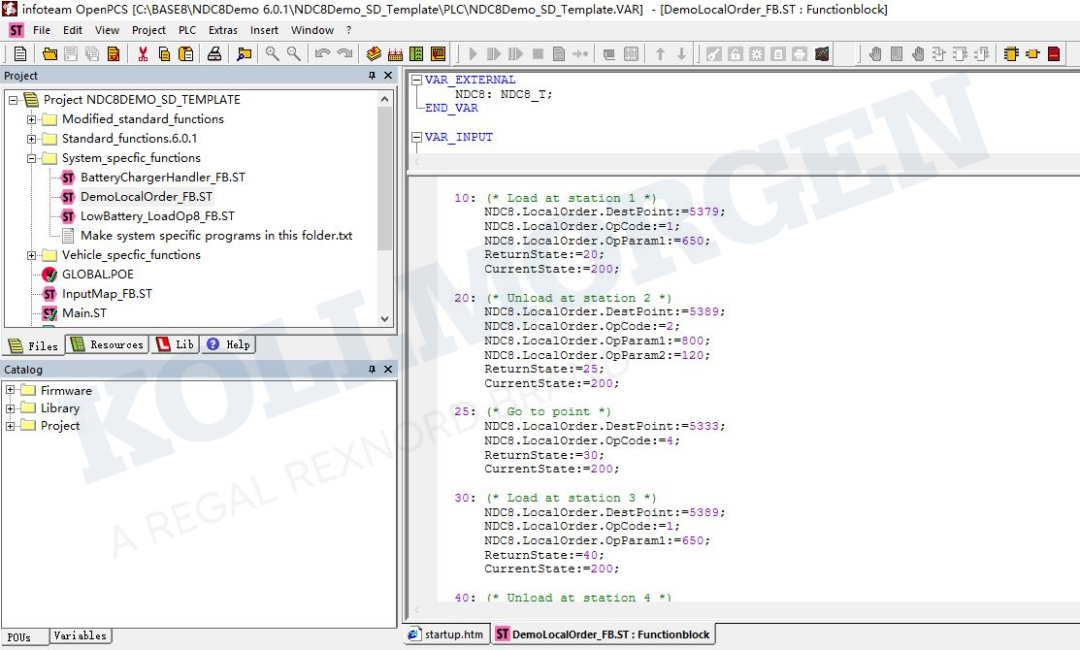
如果我们只是想同时测试一个AGV的话,可以有一种更加简单的方法,不需要System Manager,不需要额外的电脑,不需要网络,在AGV控制器CVC上做简单编程就可以实现AGV单车的连续自动运行。这里我们要用到Localorder()这个功能,在NDC8Demo中有一个现成的示例可以直接拿来使用,我们只要把需要去的目标点按照实际运行顺序写入程序就可以了。
AGV可以自动运行后我们还需要自动测量和记录数据的功能。
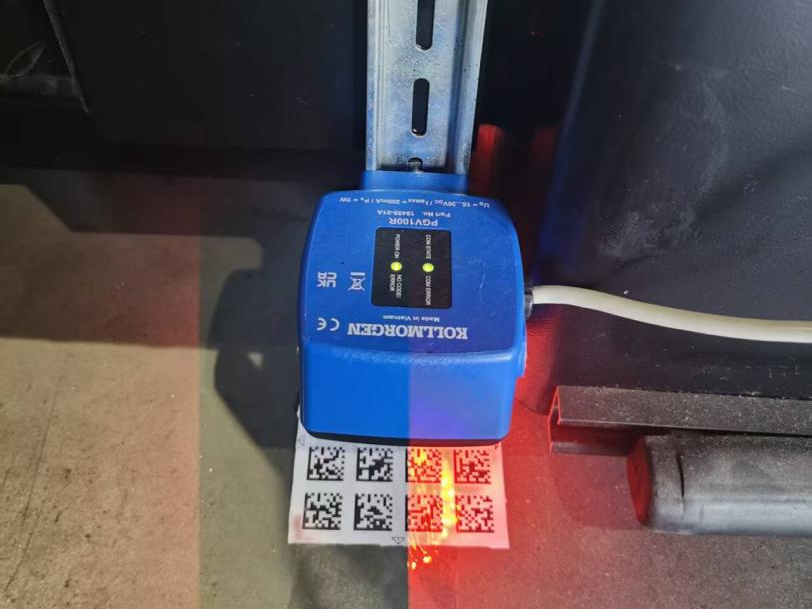
这里介绍的方法是通过读取贴在地上的二维码来记录每次的位置偏差。AGV上安装一个PGV(二维码传感器),每次AGV到坐标点停止以后PGV读取相对二维码的偏差量,来实现自动测量。
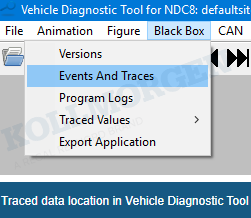
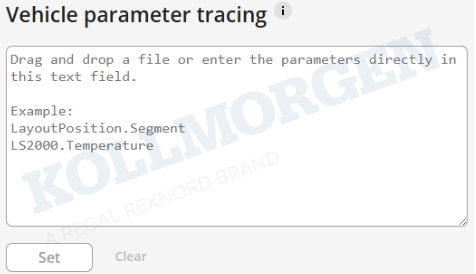
得到测量数据后还需要记录数据。CVC自带的Symbols Trace功能可以把选定的NDC变量和PLC变量记录下来,通过黑盒子读取出来。读取黑盒子需要用到软件Vehicle Diagnostic Tool,在菜单Black Box> Events and Traces 打开记录的变量。
在PLC里面我们可以记录所有的变量,不仅仅是NDC变量。
下面是一个使用的例程。

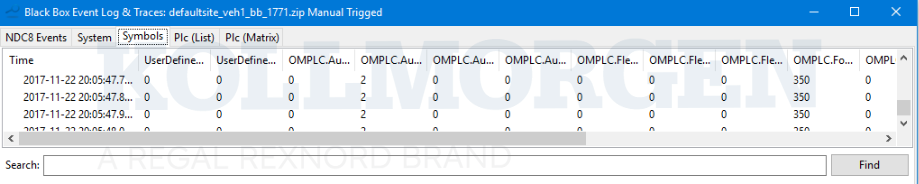
这样的话每个PLC周期相应的变量都会更新记录下来。也可以在PLC里面加一些条件判断语句,只有满足特定条件的时候才记录。这里我们只需要在AGV停在坐标点的的时候才记录二维码的读值,每个PLC周期都更新的话会导致黑盒子里面有很多重复的数据不利于分析,因此这里我们把二维码的读值赋值给NDC变量Userdedine中,把相应的Userdefine变量放到symbol_trace_list.tx文件,将此文件在CVC网页上下载到CVC里面,这样就是只有相应变量变化的时候才会记录,便于分析数据。
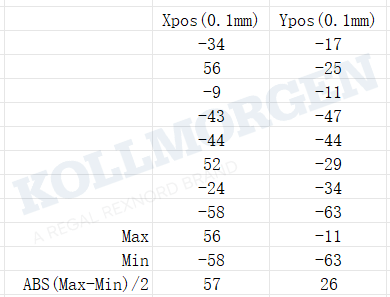
将黑盒子里面记录的数据复制到Excel表格中,利用公式自动计算出最大值和最小值偏差的一半作为重复定位精度。
Kollmorgen AGV在过去的50多年里,通过NDC平台为自动导引车(AGV)和移动机器人提供了车辆自动化解决方案。通过OEM和系统集成商合作伙伴的生态体系,在全球范围内为各种应用部署了数万辆先进的自动引导车辆。
科尔摩根AGV的解决方案由:系统、车辆、软件工具和服务组成。其中NDC平台不仅支持目前市面上多种主流导航方式,如激光导航,自然导航,二维码导航等,还支持他们的组合导航方式。同时,NDC平台包括用于管理车队和有效引导车辆的软件,以及用于导航和控制的硬件。后期,科尔摩根AGV 定期为合作伙伴提供技术支持,培训,咨询等服务。
使用Kollmorgen NDC8,合作伙伴几乎可以实现不同类型的车辆或移动机器人的自动化,并将其集成到全球任何行业的任何类型的应用场景中。为终端用户降低从前期项目实施到后期系统运维各方的实际成本。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号