在智能物流机器人领域,行业顶尖企业的技术选择往往代表着产业发展方向。近期,一家引领智能场内物流变革的领军企业,在其创新的复合机器人系列产品中,集成稳信 AMR3000控制器,将其作为整个机器人的 “智能运动中枢”。
什么是复合机器人?
复合机器人(又称移动协作机器人)是融合了自主移动平台(AMR):负责机器人的全域移动能力,集成驱动轮系、避障传感器和定位系统,承载机械臂本体和所有计算单元和协作机械臂(机械臂):执行抓取、装配、操作等精细任务的智能化系统。

1. 高算力实时决策
复合机器人在动态环境中穿梭,需要瞬间理解环境并做出安全、自然的移动决策。AMR3000采用先进的ARM架构,搭载瑞芯微旗舰级RK3588和RK3576处理器,内置的6TOPS NPU可实时运行复杂的视觉语义分割与目标追踪算法,确保定位、规划与控制任务并行处理。底盘从此具备 “场景理解”能力,能区分地板、斜坡,并识别障碍物,做出拟人化的移动策略。

智控移步,尽在掌握
2. 丰富的接口矩阵,构建底盘“全身神经网络”
自主移动平台(AMR)底盘是连接复合机器人“四肢”与“感官”的枢纽。AMR3000提供了丰富的接口,通过与定制MCU的结合,实现远超其原生I/O能力的专业控制功能:
实时控制总线:通过EtherCAT或CAN总线,不仅控制轮毂电机,更能向上半身关节控制器同步发送底盘运动状态,实现全身运动协同。
导航任务执行:在底盘控制核心上实时运行SLAM、路径规划与避障算法,响应导航指令,确保移动的准确性和安全性。
I/O功能与安全控制:通过隔离数字输入通道,直接接入安全触边传感器和急停按钮信号由控制器实时处理,触发毫秒级的安全响应(立即切断电机使能)。
灯光与声光报警:控制底盘状态指示灯、警示灯和蜂鸣器,实现人机交互与状态指示(如运行中闪烁绿灯,故障亮红灯)。
扩展安全传感器:可接入安全激光雷达、超声波传感器等,实现多层级的安全防护。
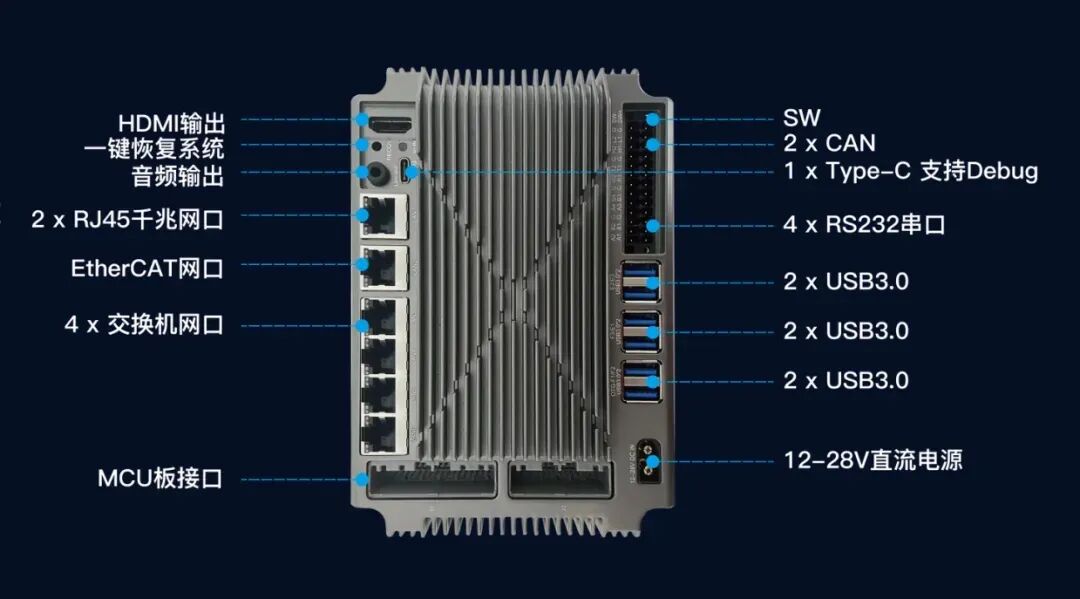
AMR3000接口分布(定制MCU板接口)
3. 实时运动控制,实现底盘与机械臂深度协同运动
复合机器人的上半身是协作机械臂(机械臂)。我们基于 AMR3000 强大的算法,实时性优化的 Linux 系统,完成了对 IGH EtherCAT Master等主流开源主站的原生适配与深度优化,将其变成了一个开箱即用的功能模块。AMR3000运行IgH EtherCAT Master作为统一的通信主站,通过一条EtherCAT总线,同时连接并控制底盘驱动和机械臂关节的所有伺服驱动器。
通过同步的EtherCAT周期,将底盘和机械臂的下一时刻目标指令同时发给所有驱动器。机械臂控制器根据收到的底盘扰动信息进行前馈补偿,使其末端在惯性空间内保持稳定,精准抓取。
AMR3000集成成熟的IgH EtherCAT Master,完整支持从站扫描、PDO/SDO通信、完整支持 DC(Distributed Clock)机制,提升多从站同步性能,使得复合机器人在快速运动中,关节间的同步误差可降低至微秒级。是实现底盘与机械臂深度协同运动的核心技术基石。

4.轻量化紧凑化设计
AMR3000的尺寸为:170(宽)*42(高)*116(深)mm,其面积仅与成人手掌相当。这一革命性的小型化设计,为AMR3000带来了多重核心优势:
轻松嵌入复合机器人内部:复合机器人AGV底盘空间受限,但AMR3000能轻松嵌入,几乎不占用宝贵的设计空间。
接口朝上设计:极大地减轻了整机工程师在结构布局上的压力,让机器人内部结构更简洁,布线更优化。


AMR3000控制器与iPhone 15pro MAX大小对比
5.防护周全,接口涌浪隔离保驾护航
AMR3000的串口全部配备涌浪隔离防护,能有效抵御电压冲击和电磁干扰,确保通信稳定可靠。这种贴心的防护设计大幅提升了控制器的环境适应性和使用寿命。内部采用无线缆设计,最大限度避免震动,移动使用,运输和线缆接触不良对设备通讯的影响,确保设备高效运行。
AMR3000移动机器人控制器,不仅提供了强大的NPU算力,更独家打造了从模型到部署的全栈软件支持,旨在将AI应用开发化繁为简,让您专注于算法创新本身。提供RKNN模型转换,环境配置以及NPU的运行库。Ubuntu和安卓系统的全面兼容,成功地将硬件性能的“硬实力”与软件环境的“软实力”相结合。它不再是一个固定的硬件模块,而是一个开放、灵活的创新平台。
将AMR3000内置复合机器人,并非简单的部件替换,而是赋予机器人“运动的智能”。为您的机器人选择了一条通往更灵活、更智能、更可靠未来的技术路径。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号