· 减速器标准化制定
提到减速器,不得不说由于仿人机器人运动特点,舵机主要工作在低速高扭矩场景,而具有高速度低扭矩特性的电机无法满足直接使用需求,只能通过减速器来降低速度和提高扭矩。
仿人机器人常用的减速器主要有三大类,由于机器人对于控制上精度要求较高,回差是机器人用精密减速器的关键性能指标之一。

目前,精密减速器标准有GB/T30819-2014《机器人用谐波减速器》和GB/T 35089-2018《机器人用精密齿轮传动装置实验方法》。然而,这两个标准对机器人精密减速器的回差都没有详细规定,回差又分为静态和动态,对应的测试方法不同,非常有必要建立一个国家级的标准。作为中国通用机械工业协会减变速机分会标准化委员会委员,优必选科技积极参与《精密减速器回差测试与评价》标准制定工作,统一减速器回差测量和评价方法,促进机器人关节控制工作研究发展。
整机构型的关键工具
仿真平台是整机构型的关键工具,对于任何机械设计工作的重要性不言而喻。
不同的整机构型,哪怕只有一点点差异,从外观上很难观察出来,都会对机器人造成很大的影响。有了仿真平台,就可以对机器人物理模型进行动作模拟,缩短研发周期,减少设计风险。

在仿真平台上,针对整机构型的优化,包括了设计变量、限制条件、目标函数三个部分。
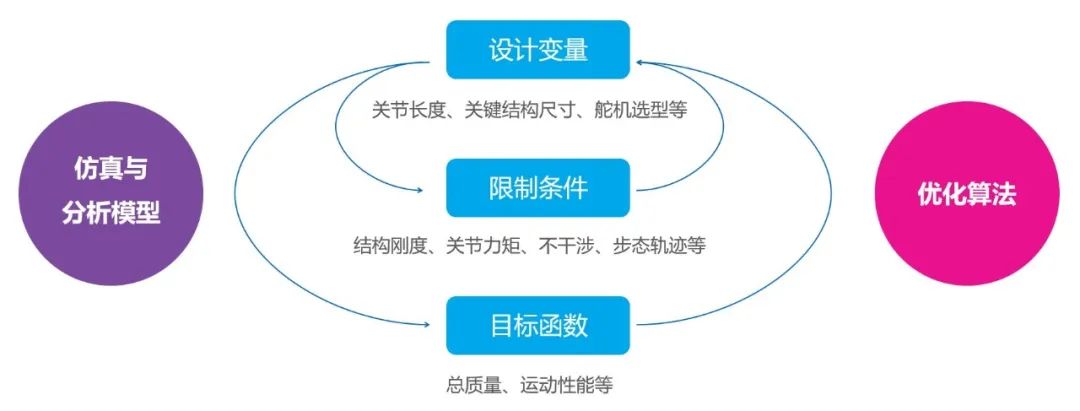
机器人机械系统优化
其中设计变量包括关节长度,比如机器人腿长,还有伺服驱动器选型,比如电机、减速器等不同组合;限制条件,包含了结构刚度及强度、关节力矩、步态轨迹;最终希望达到机器人总质量最轻、运动性能最好的优化目标。

快速行走仿真&实际效果对比
如上图所示,Walker除了手臂摆动不一致,腿部步态和运动算法都是一样的。同时,也会对仿真和真机的关节力矩曲线作比较,更好地指导实际的真机设计和测试。
未来发展趋势
在整机构型的未来发展趋势上,一是伺服驱动器和整机构型的融合设计,机电和运动控制方面的联合仿真,实现机器人的最优设计;
二是引入弹性元件,为电驱动伺服驱动器提供辅助力矩和缓冲地面冲击;
三是仿生学应用,我们知道,仿人机器人很多设计都是模拟人或动物背后的原理,这些动物和人体骨骼肌肉的研究将助推机器人机械技术的发展。

一起走进人机共存的时代
不难想象,仿人机器人的机械结构,在未来一定会得到快速发展和广泛应用。优必选科技将持续投入核心硬科技,让人类的生活方式变得更加便捷化、智能化、人性化。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号