通过国内外的研究现状对比,可以看到整机构型对于仿人机器人具有十分重要的意义▼
① 整机构型对机器人的运动性能有重要影响:
LOLA机器人做了多种大腿和小腿的结构比较,最后从中选优,其目的是通过构型的改变提高机器人运动性能。
② 减少机器人重量和腿部转动惯量对提升机器人的运动性能有帮助:
Digit机器人将膝盖伺服驱动器上移到大腿,踝关节伺服驱动器上移到小腿,减少腿部转动惯量,步行速度明显提升。
③ 增加腿部弹性机构可以减少机器人行走冲击力和储能:
Digit机器人减少腿部转动惯量,同时增加弹性元件,提升机器人运动能力和安全性。
整机构型的研究应用
下面我们从运动关节、构建流程、减速器等几个方面,来看看仿人机器人的整机构型研究及应用。
· 整机构型和伺服驱动器的关系
整机构型和伺服驱动器之间有两种关系,一类是伺服驱动器作为独立模块,单独测试组装,再和整机结构连接;另一类则是伺服驱动器结构和整机融合在一起。优必选大型仿人服务机器人Walker目前用的就是第一种方案。

Walker可以实现开冰箱、递送物品等灵活服务动作
· 仿人机器人的运动关节特点
Walker作为“智能助手”,在一些特定场合,能够帮助或代替人类完成简单重复的服务。因此,在做机器人关节设计时,我们首先看看人类关节和肌肉是怎么工作的。
人的关节运动的特点之一,是运作速度快、机动性好,同时脚着力点是离散的、高速碰撞的。
如何满足这种关节运动特点?这就需要在关节设计的时候,实现瞬时高功率输出、高能量利用效率以及抗瞬时冲击能力。

Walker具备上楼梯的适应能力
因此,弹性驱动器的概念被提出,它的基础来源于Hill三元素力肌肉模型,主要由三部分组成:CE收缩单元、SE串联单元、PE并列单元,分别有两种组合形式:PS肌肉模型、SP肌肉模型。
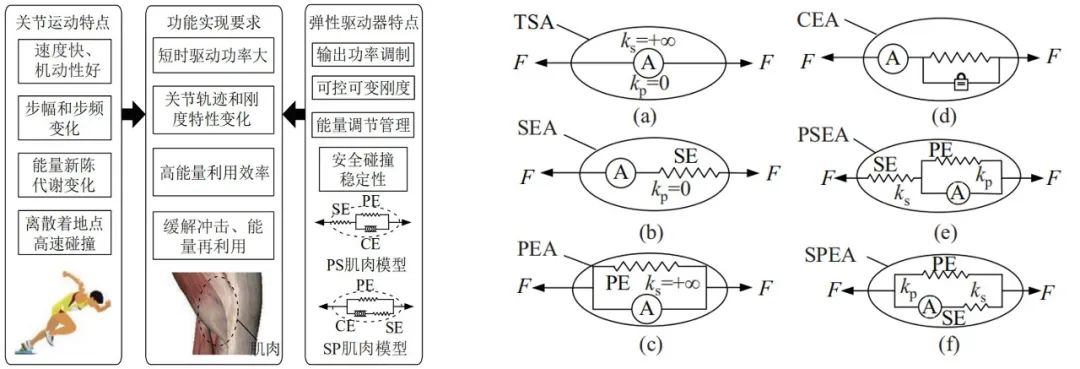
当两种模型转换成机器人应用的驱动器时,可以产生多种形式(上图右):
(a)是传统的刚性驱动器,可以理解为电机+减速器+编码器;(b)是传统的驱动器+弹性单元,然后连接负载,构成SEA串联驱动器;(c)是在传统的驱动器外并联一个弹性单元,就是PEA;(d)在SE的基础上增加离合器clutch,弹性单元可以被控制;(e)(f)则是以上三种的一个组合形式。
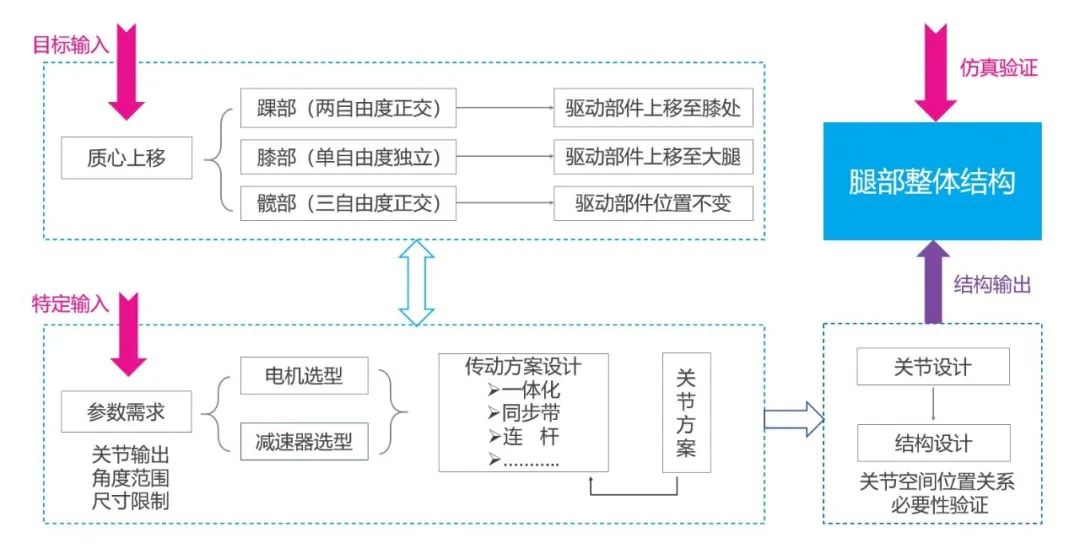
· 整机构型的构建流程
对于Walker整机构型的构建流程,首先定义每个关节的力矩需求、转角需求、尺寸规格等,再根据需求去选择电机、减速器、编码器等。
整个驱动器方案做好后,再设计仿人机器人的构型,把机器人整机三维模型放进仿真平台测试,经过几轮迭代,得到一个优化设计。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号