Roboshop作为仙知机器人自主研发的可视化操作软件,软件集成了机器人控制,地图构建及编辑,机器人建模等移动机器人应用中常用的功能,旨在为用户提供 快速、准确、稳定 的移动机器人解决方案。为方便用户使用,继之前介绍了地图构建与重定位功能,本期重点介绍路径导航的操作方法:
路径导航
路径导航,是移动机器人最基本的运动方式之一。在仙知机器人可视化操作软件Roboshop中,路径导航是指移动机器人按照在Roboshop中编辑好的固定路线进行运动的方式。本期将重点介绍从线路外进行路径导航到站点与机器人在线路上路径导航两种情况。
(一)从线路外进行路径导航到站点
前提条件:地图上至少存在两个站点且其通过贝塞尔曲线进行连接
操作方法:
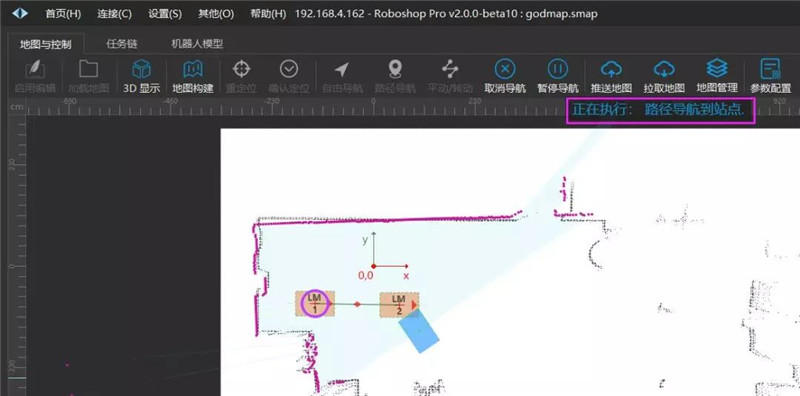
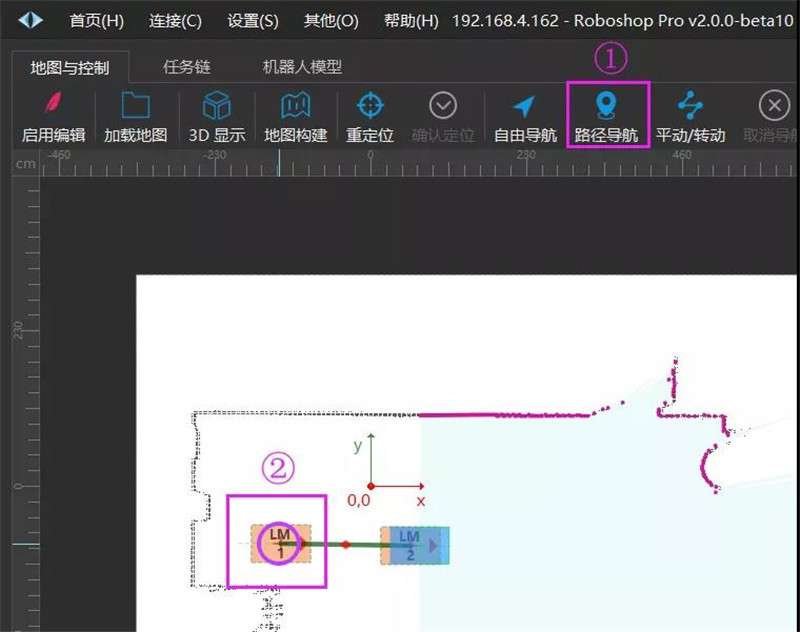
点击模块工具栏中的【路径导航】①,然后点击一个站点,如点击LM1点②,则机器人会先进行自由导航到线路上,然后进行路径导航沿着线路运行到目标点(LM1点),且机器人到点的朝向与站点朝向一致:

点击完成后,机器人会开始进行导航,如下图所示:
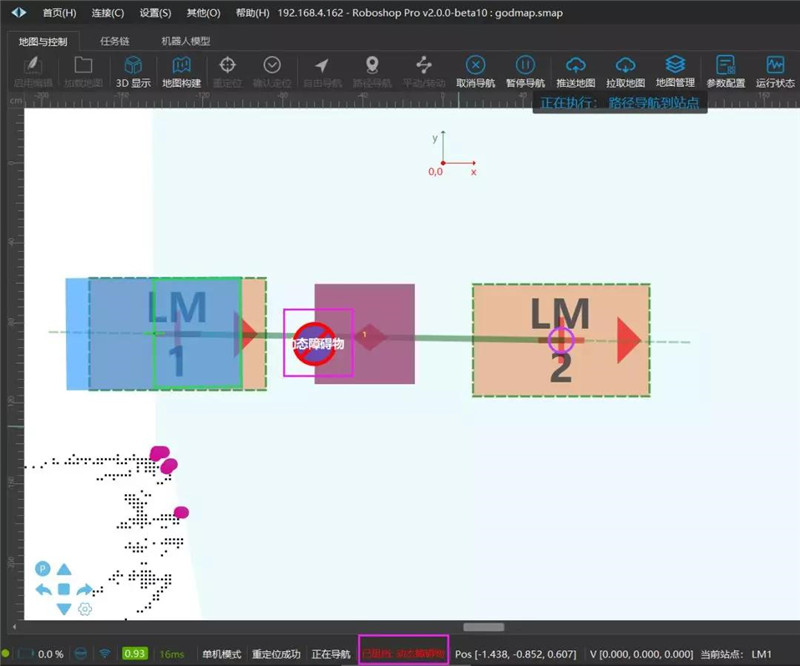
若在线路上出现障碍物,则机器人会在障碍物前停止,直到障碍物消失之后才会继续运行,且在状态栏中显示阻挡原因:
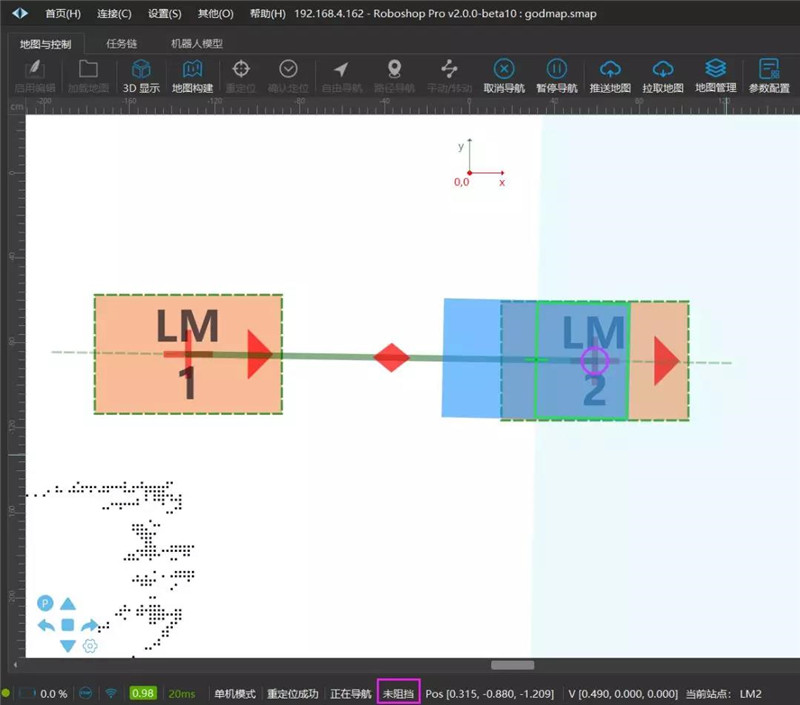
障碍物消失后,则状态栏的阻挡信息清除,机器人恢复运行到目标点:
(二)机器人在线路上进行路径导航
前提条件:地图上至少存在两个站点且其通过贝塞尔曲线进行连接
操作方法:
点击模块工具栏中的【路径导航】①,然后点击一个站点,如点击LM1点②,机器人会进行路径导航沿着线路运行到目标点(LM1点),且机器人到点的朝向与站点朝向一致:
线路存在障碍物,机器人会障碍物前停止,直到障碍物消失之后才会继续运行,且在状态栏中显示阻挡原因。
(三)多个站点间的路径导航
与前述的路径导航使用方法一致,不同的是可以根据需求对地图添加更多的站点,并使用贝塞尔曲线将其进行连接,从而达到多站点之间路径导航的目的。
这里需要重点强调的是,仙知机器人路径导航不仅可以直线行驶,也能按照任意曲线行驶,这是因为在Roboshop中采用了【贝塞尔曲线】,可以轻松画出直线与任意曲线。
贝塞尔曲线
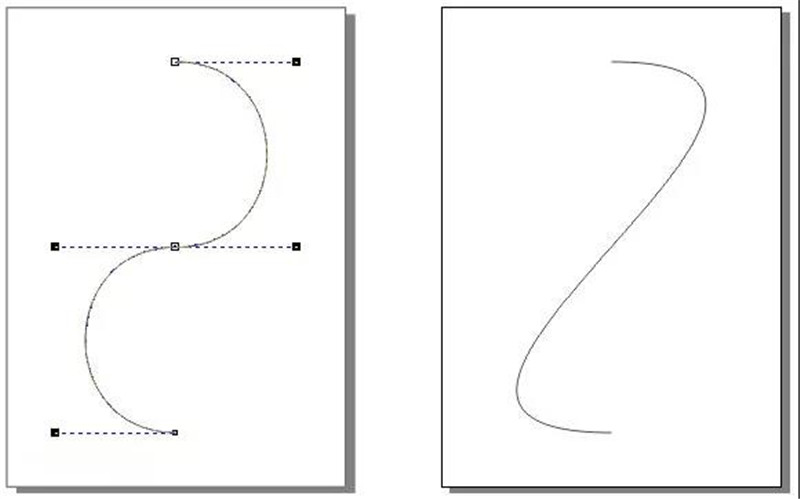
贝塞尔曲线,又称贝兹曲线或贝济埃曲线,是应用于二维图形应用程序的数学曲线。它由线段与节点组成,节点是可拖动的支点,线段像可伸缩的皮筋,通过控制曲线上的四个点(起始点、终止点以及两个相互分离的中间点)来创造、编辑图形。用“贝塞尔”工具无论是画直线或是曲线,都非常简单,随手可得。
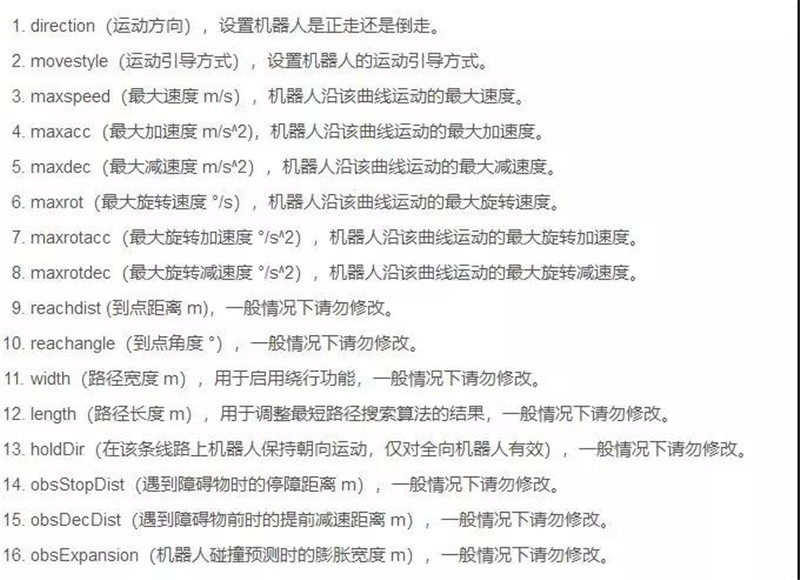
仙知可视化操作软件Roboshop对贝塞尔曲线属性的设定,包括运动方向、最大速度、最大加速度、最大减速度、最大旋转加速度等等,具备独特的优势,能方便用户精确设定机器人路径导航与运动参数。
上海仙工智能科技有限公司(简称仙工智能或 SEER)由 RoboCup 世界冠军团队创立,是一家以智能控制及数字化为核心的工业物流解决方案提供商。公司总部位于上海,全国设有 7 个办事处、2 个生产基地,业务遍及全球 20 多个国家和地区。
仙工智能掌握世界领先的技术与理念,打造智能、高效、可靠、易用的端到端工业物流解决方案,方案涵盖移动机器人控制器、各类移动机器人及相关数字化系统软件,帮助客户降本增效,实现智能化与数字化升级。
以【惠人达己,守正出奇,始终创业,追求极致】的品牌价值观为导向,凭借卓越的产品力、方案力与服务力,仙工智能为西门子、菲尼克斯、潍柴动力、格力等全球 800 多家企业提供服务。客户覆盖半导体、3C、锂电、光伏、汽车零部件、PCB、纺织、医疗等行业,项目交付率达 100%。仙工智能,以实力引领工业物流智能化进程。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号