
新品重磅发布
当自动驾驶算法应用于真实道路和物流运输,当专业级机械臂走进课堂示教编程,在这个人工智能与机器人技术的快速发展的时代,人们不再满足于基础编程实践,而是渴望在仿真环境中探索多机协同算法等前沿课题。与此同时,实验室对机器人模拟场景中测试识别、抓取、避障、搬运全链路也提出了更高期待。
因此,移动复合机器人myAGV Pro应需而生。
myAGV Pro是大象机器人旗下的全向转向系统小车,适配大象机器人旗下轻量化协作机械臂生态和市面上大部分通用协作机器人,能够完成多目标环境检测、语音语义识别等人工智能的相关应用,我们希望这款复合机器人底盘能够为研究人员与开发者在智能机器人领域进行仓储搬运、教学学习、创新应用、科研研究和竞技比赛等场景提供一个理想平台。
七大核心亮点,驱动高效探索
1、多样模块,扩展无限可能
myAGV Pro 采用模块化设计理念,拥有丰富配件,可选配Jetson Orin Nano主控或其他外接控制器,更可扩展2D/3D激光雷达与视觉相机模组,轻松构建个性化具身智能方案。
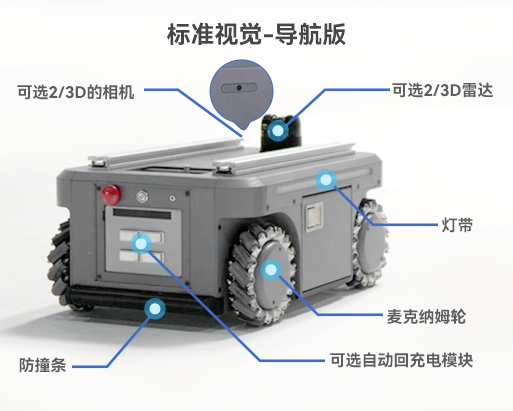
2、全向驰骋,征服复杂地形
强劲电机实现1.5m/s极速运动,标配摇摆臂独立悬挂系统,自由选配麦克纳姆轮/驱动+万向轮
轻松攀爬10°陡坡,50kg高负载,无压力承载各类协作机械臂,平滑地面到障碍地形皆能从容应对。
3、丰富生态,支持二次开发
原生搭载Ubuntu 22.04,提供RVIZ、Gazebo仿真环境支持。同时集成ROS2 Humble框架,支持Gmapping、Cartographer及Rtab-map主流3D SLAM算法。全面开放Python/ C++/ ROS2/ RS232串口通讯协议控制等二次开发通道,助力用户全心投入创新内核,告别繁琐环境部署,快速完成从高精度建图导航到多机协同的各类开发任务。

3D SLAM建图
成立于2016年中国·深圳,深圳市大象机器人科技有限公司是一家专注于机器人研发生产、平台软件开发及智能制造服务的全球性新高科技企业。核心团队由英、美、澳海归与俄罗斯外籍工程师团队组成,与墨尔本大学,俄罗斯国立核能研究大学,华南理工大学等高校,建立联合实验室并突破关键技术,打造了从教育到专业级别的一系列协作机器人解决方案。
公司自创立之初便奠定了国际化创新基础,由美国硬件孵化器HAX孵化,先后荣获云天使,SOSV,东方证券,深创投,真格等一线基金注资,以推动全球业务的快速增长。秉持“Enjoy Robots World”的愿景,大象机器人从生活乐趣和工作效率出发,已自主研发机器人产品包括仿生机器人(MarsCat火星猫),消费级协作机器人(myCobot/myPalletizer/myAGV),专业级协作机器人(P/C/myCobot Pro及关节模组)。
2021年,大象机器人产品广泛应用于智能制造生产、商业场景、科研教育、家居生活等多个领域,其产品质量及智慧方案备受全球市场关注,以中,英,美,德,法,日等地为核心市场,全球销量超过一万台。 未来,大象机器人希望通过新一代尖端科技推动机器人产业发展,携手与客户伙伴们共同开启自动化智能化新时代。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号