图6呈现了一项更具挑战性的任务——无人机执行动态穿环飞行实验。通过向CoNi-MPC输入预先规划的8字形航迹,四旋翼无人机能够顺畅地连续飞越固定于无人车(松灵Scout Mini)平台侧面的四个圆环,圆环直径仅为机身宽度的两倍左右,每次穿越圆环时无人机两侧仅留有100mm左右的空隙。与此同时,无人车沿着世界坐标系中的S形轨迹行驶。
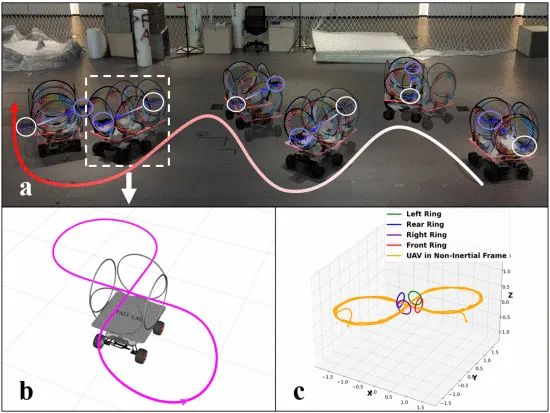
图6. 穿环飞行实验。无人车的平均移动速度为0.15 m/s,最大速度为0.38 m/s,无人机可穿越飞行过其上所附的圆环。(a) 表示穿环飞行的实际过程;(b) 表示无人车非惯性系中无人机所跟踪的8字轨迹;(c) 表示无人车非惯性系中无人机实际飞行轨迹。
借助CREPES系统,研究人员还在室外环境中进行了实验,其中无人车通过遥控随机运动,而无人机则跟踪圆形轨迹飞行。值得注意的是,完成这一任务并未借助GPS/SLAM/固定基站等定位技术。图7展示了跟踪过程的一系列实验结果。
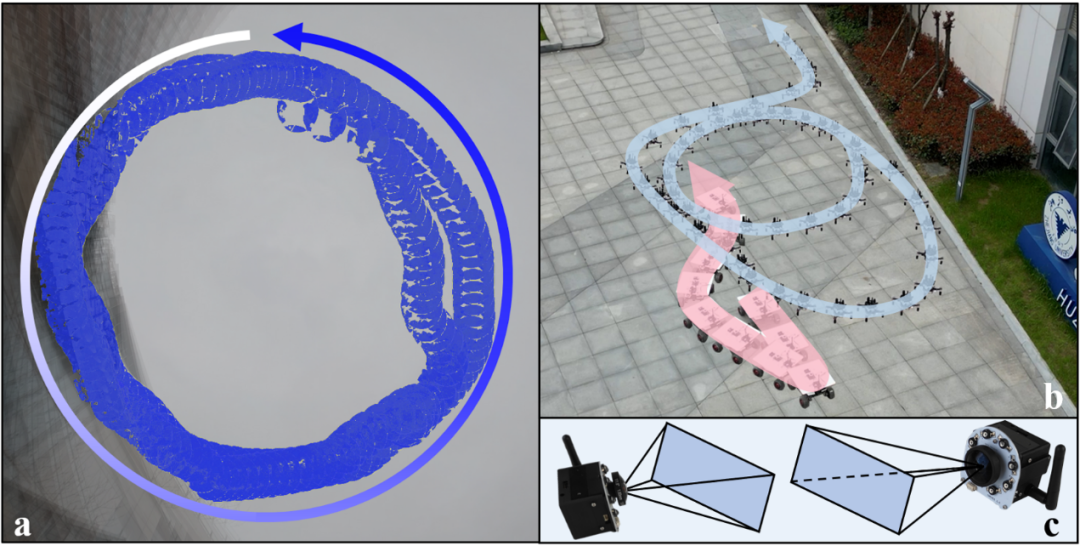
图7. 室外实验。(a) 表示无人车第一视角观察到的无人机飞行轨迹,(b) 是从第三人称视角拍摄得到的无人车和无人机实际运动轨迹。(c) 展示了在室外实验中使用的CREPES设备。
实验结果验证了该控制器的卓越鲁棒性和出色的跟踪性能。展望未来,此种方法有潜力被拓展应用到多智能体编队控制领域,以及执行更为复杂和要求更高的协同任务中。
此外,为了进一步拓展空地协作的应用形式,研究人员还提出一种高效、独立的空中集群无人机和地面自主机器人协同系统。旋翼无人机以一系列固定点为参考状态进行悬停飞行,由相对于地面机器人旋转的非惯性系充当中介,间接达成环绕跟踪的目的,无需预先规划连续轨迹,从而简化了系统设计与实现,其效果如图8所示。
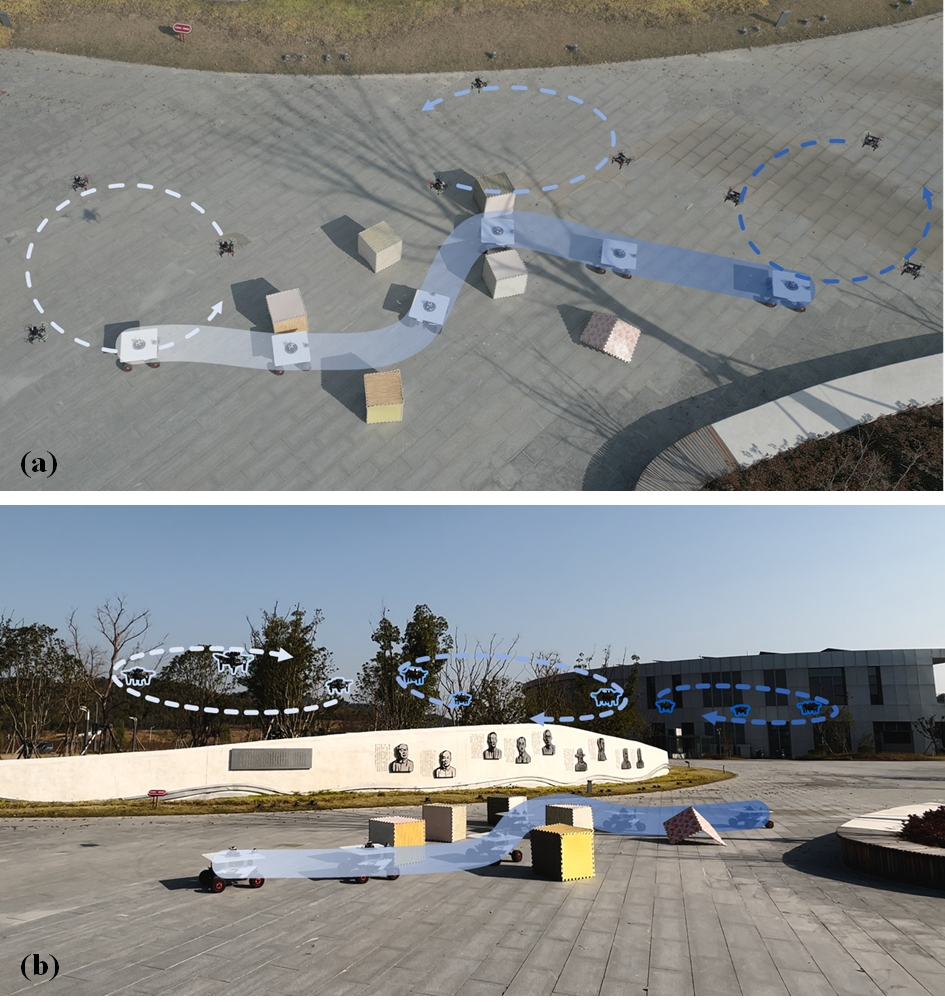
图8. 旋翼无人机集群环绕跟踪协同控制实验结果示意图
研究贡献
该研究开创性地展示了仅借助相对位姿估计信息和移动目标IMU数据,就能实现无人机与无人车(松灵Scout Mini)之间的复杂交互技术。
其研究贡献包括:
1. 通过非惯性参考系中对旋翼无人机进行完全建模,设计了一套新颖的空地协作运动控制系统框架CoNi-MPC,并采用非线性模型预测控制(NMPC),实现了对无人机与移动目标间相对运动的精确操控。此系统架构的一个显著特点是,它不依赖于在世界系中的绝对状态和运动估计,即无需GPS和SLAM定位技术,从而简化了交互所需的数据输入和传感器要求。
2.建立了一种旋翼无人机在非惯性系下的相对运动模型,将与移动目标相关联的动态因素进行归纳整合,并利用来自移动目标机体坐标系的IMU数据进行替代。这一策略有效摆脱了对移动目标运动模型的依赖,无需其运动模型作为先验信息,增强了该方法在现实环境中的实用性和可行性。
3. 所提出的CoNi-MPC控制器是一个通用的空地协作控制框架,可轻松支持无人机与移动目标之间的多种协同交互式任务,包括定点跟随、环绕跟踪、定向降落、穿环飞行等。该控制器具有较高的跟踪精度,无需连续轨迹重规划环节的参与,显著提升了协同控制的效率和可靠性。
松灵机器人成立于2016年,是全球领先的机器人底盘制造商和移动机器人系统解决方案服务商。目前,松灵机器人已经拥有多款适用于不同地形的室内外移动机器人底盘,在载重、续航、速度、运动模式等不同需求场景下实现全矩阵覆盖。同时,松灵机器人还推出了自动驾驶解决方案,平行驾驶解决方案,机器人科研教育套件等移动机器人底盘配套产品,帮助客户在自动驾驶、机械控制、计算机、车辆等领域完成实验验证。
凭借领先的研发技术,松灵机器人已经与包括阿里巴巴、华为、本田、中建三局在内的30多家行业领军企业,以及中科院、清华大学、南方科技大学、北京理工大学、新加坡国立大学、纽约大学等国内外50多所顶尖学府开展了深度合作。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号