论文标题:【CoNi-MPC: Cooperative Non-inertial Frame Based Model Predictive Control】
原文链接:【https://ieeexplore.ieee.org/document/10287548】
论文作者:张宝哲、陈鑫炜、曹燕军、许超
移动底盘:松灵四轮差速驱动底盘Scout Mini
多机器人协同控制,作为机器人技术领域中的核心之一,旨在促进多个机器人之间的有效合作与互动,以执行那些超出单个机器人能力所及的复杂任务。
随着无人机及机器人技术的快速发展,无人机集群的协同操作显得愈发重要。由无人机集群所构成的多机器人系统已被广泛部署于众多场景中,包括巡检、搜救和电影制作等多个领域。通过无人机与无人车(UAV-UGV)之间的协作所构建主从式多机系统,可高效融合空中机器人与地面机器人的特有优势,从而实现优势互补的多智能体系统。现如今,对这些集成系统日益增长的需求推动了多机器人协同控制在机器人领域应用的研究热潮。

图1. 微型空中机器人穿梭竹林
前不久,来自浙江大学湖州研究院的科研团队在《IEEE Robotics and Automation Letters》以 Research Article形式发表了最新的研究成果“CoNi-MPC: Cooperative Non-inertial Frame Based Model Predictive Control。”该研究创新性地提出了新型空地协作控制框架CoNi-MPC,利用相对位姿估计信息和移动目标的IMU数据,能够直接在高动态平台的机体坐标系中控制无人机运动,消除了无人机及动态平台对于绝对世界坐标系的依赖,可在无GPS/SLAM的场景中使用。
这一突破性技术成功实现了无人机从复杂动态行驶无人车(松灵Scout Mini)上起飞,并精准地跟随车行轨迹重新降落回行驶车身上的全过程。全程不依赖GPS或SLAM技术,对无人车的运动轨迹也不做限制,无人机可精准降落在绕弯运动的无人车上。这一技术的应用在业内尚属首次,标志着车载无人机在动态平台上的起降技术取得了重大突破。
CoNi-MPC,实现在移动中直接操控无人机
通常情况下,在“空地(主体-目标)协同规划控制系统”中,需要对移动平台进行精确的状态估计,往往通过融合多种传感器(例如视觉、激光雷达、GPS、惯性测量单元IMU等)的完整SLAM(同时定位与建图)技术栈。
尽管SLAM算法能够提供丰富的环境信息,但其通常依赖于良好的环境特征来实现稳定的状态估计,这在具有挑战性的环境(GPS 据止、环境特征稀疏)或长期任务(累计漂移)中难以得到保证。而对于那些主只需要执行交互动作的协作系统而言,长时间维护一个SLAM模块不仅显得冗余,还往往伴随着较高的计算成本,甚至可能被视为是一种资源上的浪费。
另外,为了使得无人机能够精确地预测目标的运动路径进行追踪,需要掌握目标运动学模型作为先验信息。对于无人车的运动模型,通常被简单假设为匀速直线运动或匀加速直线运动,考虑到其所执行的任务形式,这样的简化显然是不切实际的,难以保证运动模型的准确性。
然而,即使是在拥有稳定状态估计和准确运动模型的条件下,无人机和无人车之间的动态变化和控制误差也要求其需要频繁的轨迹重规划操作进行修正。这不仅导致了无人机控制上的不平滑,而且会带来沉重的计算负担,难以适应板载计算资源的限制。
为应对这些挑战并让无人机实现与移动目标平台的高机动协同控制,研究团队开发了一种新颖的解决方案CoNi-MPC,在移动目标机体坐标系中直接控制无人机,实现不依赖GPS或SLAM的高机动空地协同控制。
不同于传统框架在世界系中控制无人机,CoNi-MPC直接在移动目标机体系(即非惯性系)下构建无人机的动力学模型,并设计相对应的非线性模型控制器。该方案仅依赖于相对于非惯性系的位姿和速度,以及非惯性系在世界系下的角速度和加速度信息即可实现稳定飞行。
这一方案摒弃了对世界坐标系下状态估计的需求,而只依赖于相对估计。通过引入非惯性系的IMU测量数据,可将无人机动力学模型中有关世界系的变量进行替换,从而有效消除系统对于世界系的数值依赖,使其在现实环境中得以应用。
验证CoNi-MPC控制性能与鲁棒性
CoNi-MPC作为一个通用的空地协作控制框架,支持多种交互式任务的应用,通过给定不同类型的参考状态,即可实现定点跟随、自主降落、环绕跟踪以及穿环飞行等复杂任务。
为了验证CoNi-MPC控制性能和鲁棒性,研究人员在数值仿真和真实世界中进行了大量应用实验。
实验中,研究人员采用四旋翼无人机和无人车(松灵Scout Mini)作为实验道具。四旋翼无人机的重量为591.8克,推重比达到了2.03。无人机的CoNi-MPC算法在一台搭载Intel Celeron J4125处理器(频率2.0至2.7 GHz)和8 GB RAM的机载计算机上运行。所提出的CoNi-MPC平均计算时间(单次迭代)为4.58毫秒,标准偏差为1.2毫秒,确保了在机载计算机上以超过100 Hz的频率运行。室外实验中采用CREPES系统实现相对估计,室内实验中利用运动捕捉系统模拟相对估计。
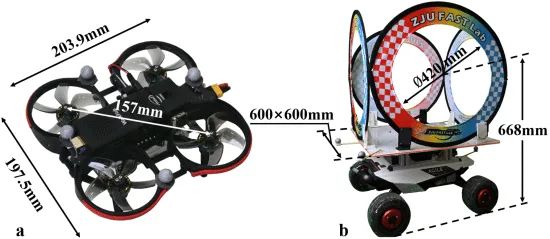
图2. 实物实验中的四旋翼无人机和无人车
研究人员通过数值仿真模拟的方式确定保证无人机稳定跟踪和成功降落的安全参数,并依据仿真模拟的结果分别为固定单点(Fixed point)和固定轨迹(Fixed plan)两种控制方案选定多组具有代表性的参数,在MPC优化问题中的约束条件与仿真中保持一致的前提下,两种方案的参数设置及其对应的平均跟踪误差如图3所示。
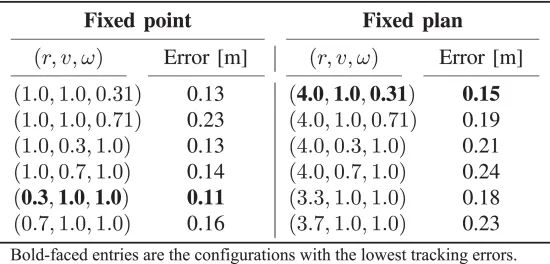
图3. 实物实验的平均跟踪误差
而两次测试的详细跟踪性能随时间变化的情况则绘制在图4和图5中。
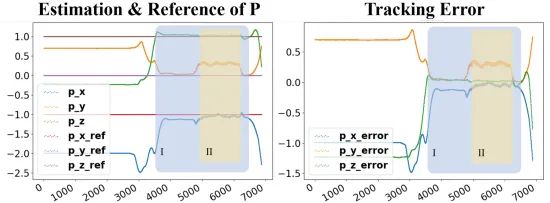
图4. 使用(1.0,1.0,0.71)参数设置进行固定单点实验。蓝色(I)为无人机程序控制模式;橙色(II)表示无人车移动过程。
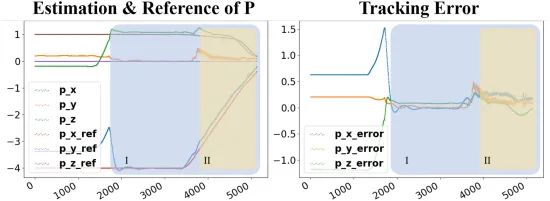
图5. 使用(4.0,1.0,0.71)参数设置进行固定轨迹实验。蓝色(I)为无人机程序控制模式;橙色(II)表示无人车移动过程。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号