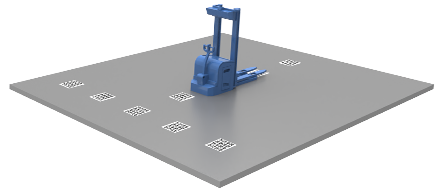
叉式移动机器人(AGV/AMR)是在叉车上加载各种导引技术,构建地图算法,辅以避障安全技术,实现叉车的无人化作业。

▲叉式移动机器人无人化作业
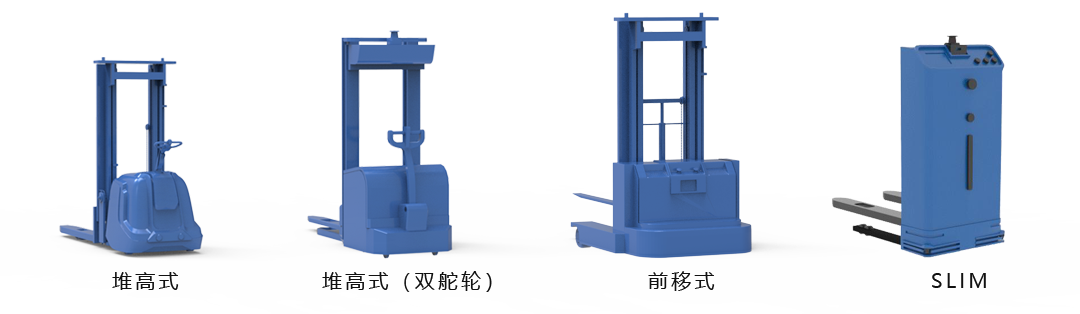
▲叉式移动机器人常见车型
叉式移动机器人在行业初期,各机构、企业所使用的控制系统大多来自海外,随着国家提出加强创新投入,规避产业链核心技术“卡脖子”风险,以及智能物流系统逐渐成熟和市场化需求的改变,物流设备智能控制管理系统的国产化成为行业共同关注的重点。
目前叉式移动机器人的一些关键零部件,如电机、驱动器、传感器和控制器仍然非常依赖国外进口,急需高品质的国产化方案。
"以科聪叉式移动机器人为核心的解决方案有何强势之处?"

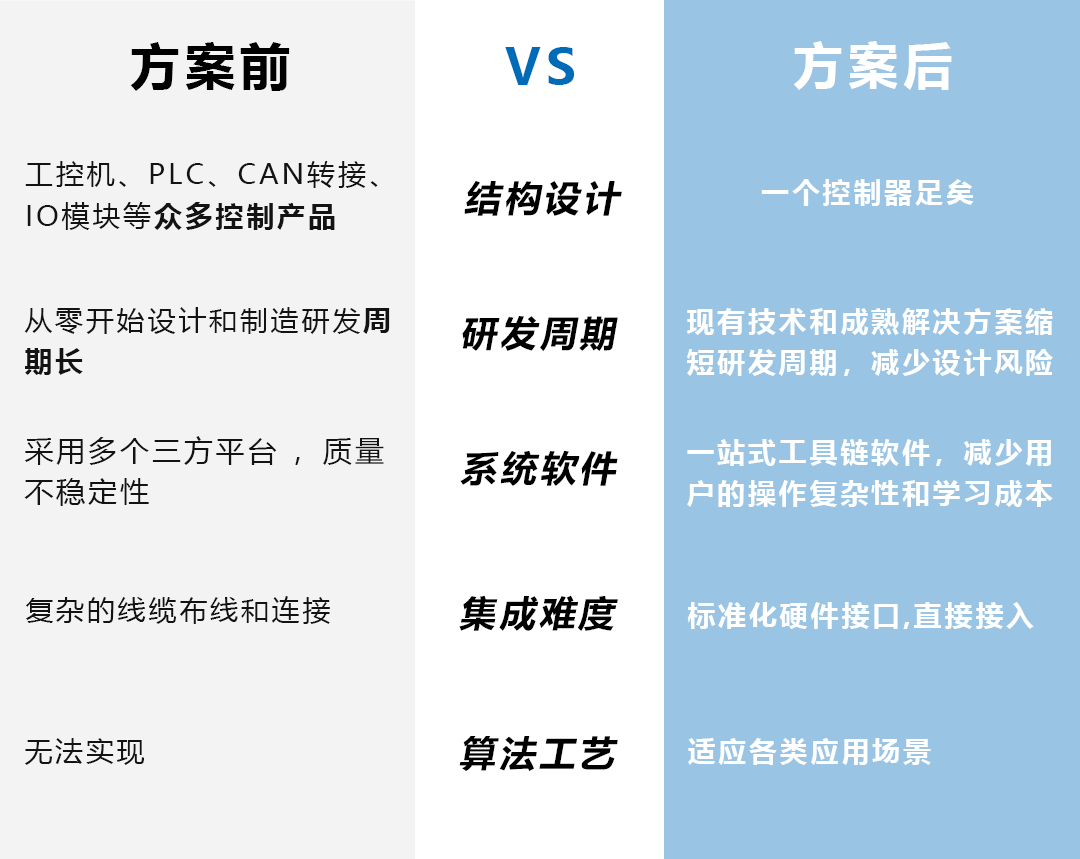
叉式移动机器人解决方案可以轻松面对不同叉车类型和众多应用场景的制造和应用。帮助制造商和终端用户降低构建移动机器人的复杂性,降低成本、提高生产效率、改善质量控制降低维修成本等。
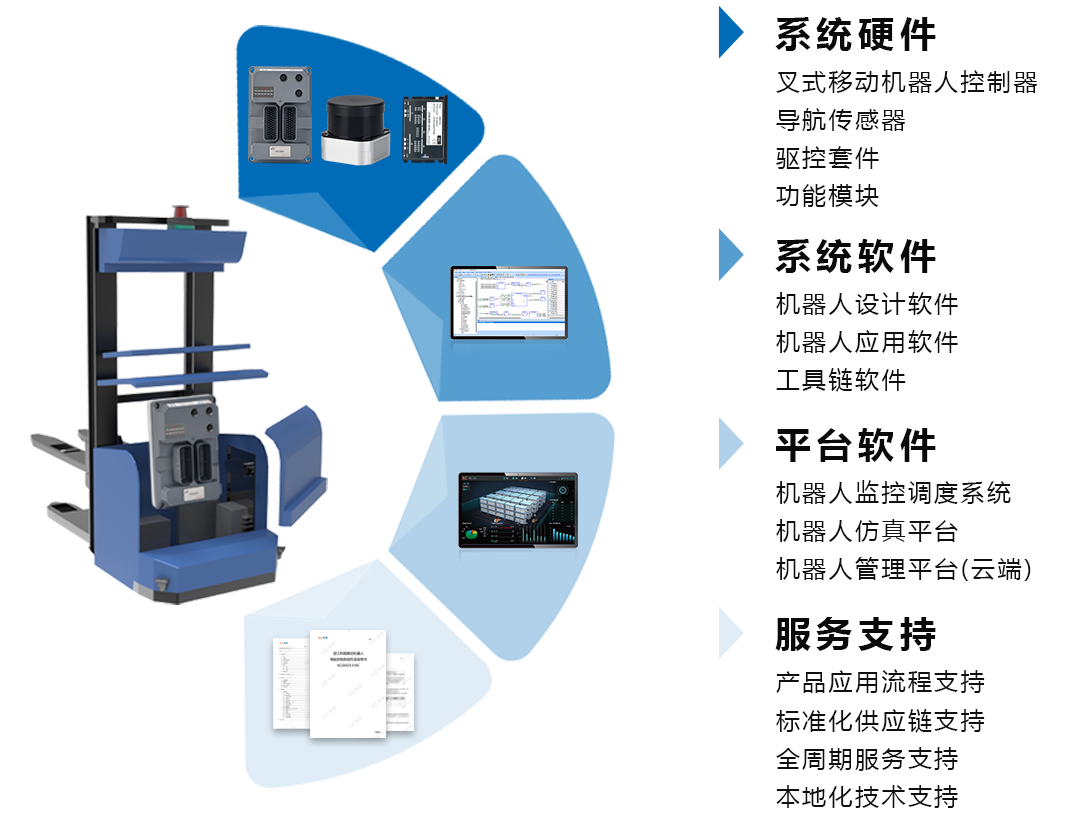
关于叉式移动机器人控制器:
ARM架构嵌入式硬件平台
4核处理器,集成全自主可编程内核和图形化低代码应用开发环境编程器

内嵌导航定位算法
支持激光导航、磁导航(选配)、二维码导航(选配)

激光自然导航
磁导航(选配)

激光反射板导航
二维码导航(选配)
内嵌运动控制算法
支持单舵轮、双舵轮
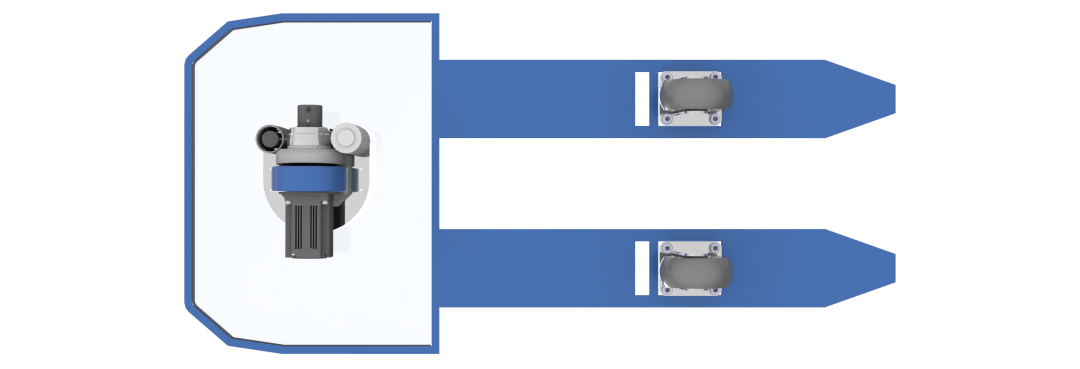
单舵轮
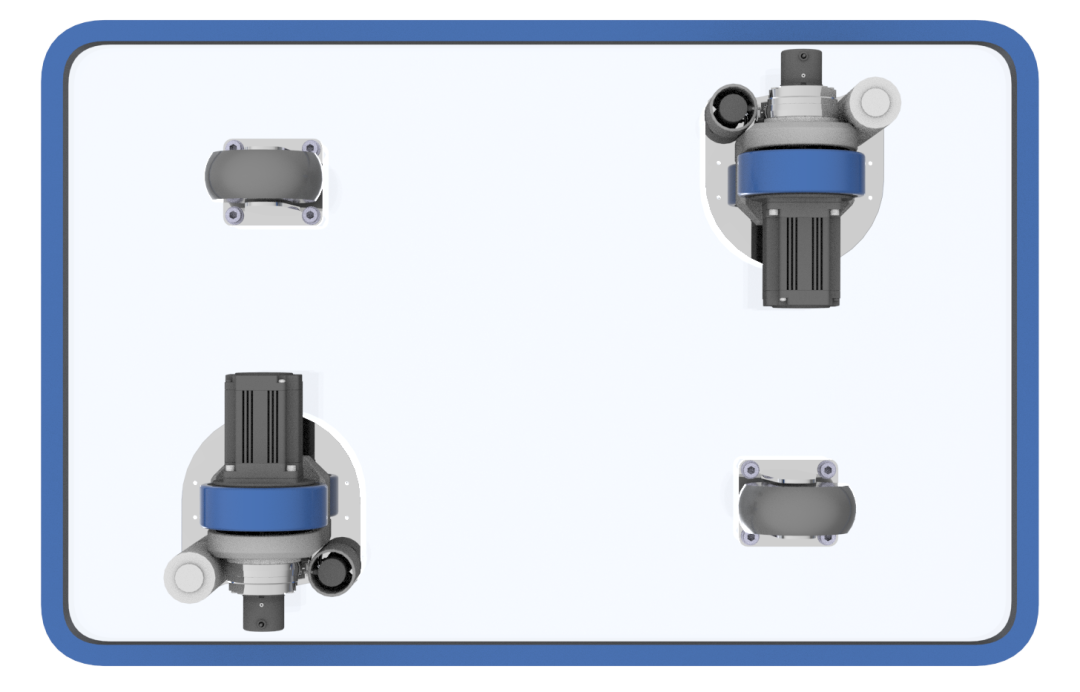
双舵轮

双舵轮
内嵌工艺算法
支持各类型场景应用功能,栈板识别、视觉定位、标志物二次定位、导航激光辅助避障、3D视觉避障等

▲栈板识别

▲导航激光辅助避障
浙江科聪是国内领先的机器人核心控制系统和整体解决方案提供商。公司成立于2015年,位于美丽杭州的钱塘江畔。公司致力于为客户提供国际一流的机器人技术、产品和解决方案。公司产品广泛应用于无人巡检、仓储、物流、安保巡逻、清洁、工程车辆、农业机械等众多领域。
公司技术实力强劲,拥有移动机器人全方位技术研发、产品化和工程化能力,覆盖机器人技术相关机械、电路、软件、算法、电气、整机集成交叉学科全领域。核心团队成员均为从业10年以上的机器人、自动化和人工智能行业技术专家。公司依托浙江大学、清华大学和中国科技大学等国内高校平台,并在国际范围内与美国卡耐基梅隆大学、德国德累斯顿大学、慕尼黑工业大学、美国硅谷的人工智能技术团队达成了伙伴合作关系。公司已掌握智能移动机器人基于多传感器融合的环境学习与精确定位技术、动态路径规划与精确轨迹跟踪技术、移动机器人多驱运动控制技术、基于深度学习与智能云的数据挖掘技术、多智体分布式协作技术、特种环境防护技术与本质安全防爆技术等一系列国内领先国际一流技术。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号