

需要配置如图上所示的 5 个参数:
1:rightStandardLength,右侧货架腿的长度;
2:rightVerticalLength,右侧货架腿的宽度
3:leftVerticalLength,左侧货架腿的宽度;
4:leftStandardLength,左侧货架腿的长度;
5:distance,货架腿内侧之间的距离;
6:use_optimization,默认勾选,代表使用优化。
此外,货架腿长和宽之间的夹角默认为 90°,也可以额外配置,当货架腿的长宽大于 6cm 时,勾选 use_optimization,可以提高识别精度。
#4使用说明
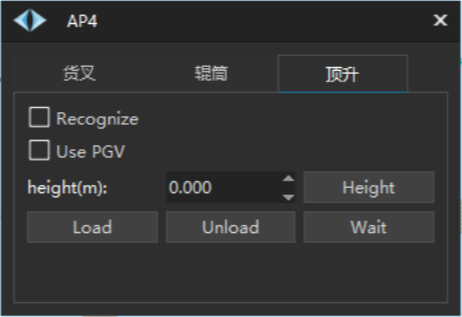
在完成上述反光膜或者形状识别的配置之后,只需要在货架点位对应的前置点属性中配置识别模型文件,即 shelf 文件,然后将线路属性中的 ObsExpansion 设置为 0,避免钻货架过程中机器人停障。接着要进行执行动作的配置:
1.需要识别货架所在位置,并钻入货架顶升起来,需要勾选 Recognize,点击Load.
2.不需要识别货架所在位置,开环的钻入到一个固定位置上,并顶升起来,不需要勾选 Recognize,直接点击 Load.
3.需要识别位置上有没有货架,并放置货架,勾选 Recognisze,点击 Unload,若有货架占用的话,会报错;不需要识别,直接开环放置,不用勾选 Recognisze,直接点击 Unload.
4.需要点击 Wait 的情况比较少,若勾选了 Recognize,再点击 Wait,机器人就会识别货架位置,钻入货架底部,然后结束任务,不会动作顶升模块;若不勾选Recognize,直接点击 Wait,机器人就会固定路径导航到工作站,然后结束任务,不会动作顶升。

那么在执行路径规划的时候选择执行动作,AGV 在这个前置点上会自动切换到识别模式,根据识别到货架腿的位置来推算出货架的中心位置并自动生成到达此位置的路线。
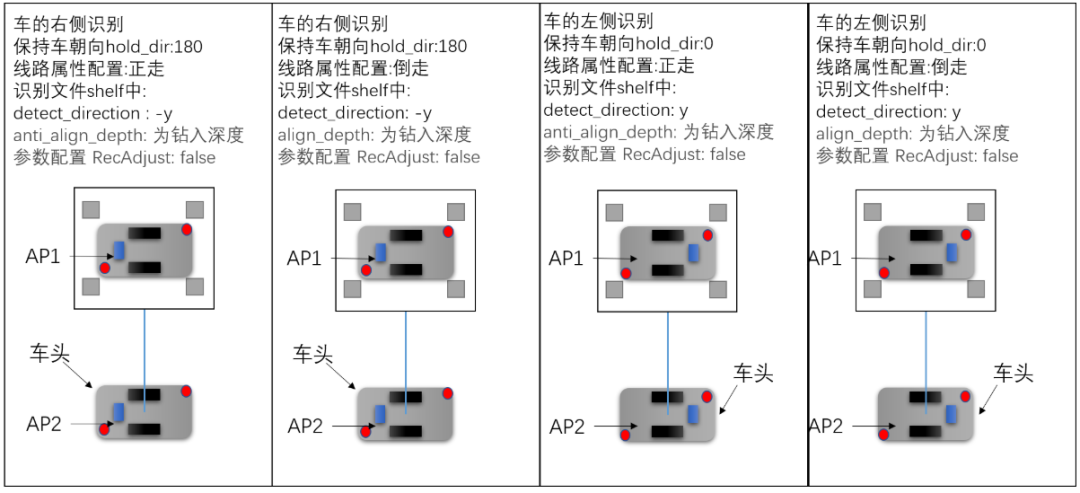
针对车头车尾都安装激光雷达的全向车,还可以通过配置实现车头、车尾、车左侧和车右侧各个方向的识别,配置如下图所示:

#5其他说明
为了减小误识别的情况,使用激光识别料架时要求货架的前面两条腿中心距离和前置识别点的距离小于 2m,中心点到识别位置激光的连线和车体的角度偏差小于 10°,料架本身的角度和识别时的 AGV 的角度偏差小于 20°.
使用激光点云形状识别功能,需要将参数配置 method_type 配置为 by_legShape,在激光雷达的识别区域要避免遮挡住货架腿;
识别精度:x,y 方向精度高于 ±1cm,角度精度高于 1°.(识别距离越近、货架腿越宽,识别越准,该精度为识别距离 1m,长宽 6cm 处测得)
上海仙工智能科技有限公司(简称仙工智能或 SEER)由 RoboCup 世界冠军团队创立,是一家以智能控制及数字化为核心的工业物流解决方案提供商。公司总部位于上海,全国设有 7 个办事处、2 个生产基地,业务遍及全球 20 多个国家和地区。
仙工智能掌握世界领先的技术与理念,打造智能、高效、可靠、易用的端到端工业物流解决方案,方案涵盖移动机器人控制器、各类移动机器人及相关数字化系统软件,帮助客户降本增效,实现智能化与数字化升级。
以【惠人达己,守正出奇,始终创业,追求极致】的品牌价值观为导向,凭借卓越的产品力、方案力与服务力,仙工智能为西门子、菲尼克斯、潍柴动力、格力等全球 800 多家企业提供服务。客户覆盖半导体、3C、锂电、光伏、汽车零部件、PCB、纺织、医疗等行业,项目交付率达 100%。仙工智能,以实力引领工业物流智能化进程。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号