识别专题行人跟随
# 为什么需要行人跟随功能?
一些人机混合工作的场景中,需要可以自动跟随人前进的 AGV,在人停下挑选产品时,AGV 也可自动停住接货,便捷搬运、快速取放货,解放人力!
通过两种方式实现行人跟随:使用反光贴和不使用反光贴。

使用方式
在使用的时候,只需要在激光雷达同水平高度的行人身上贴上一块反光贴,并在我司 RoboshopPro 软件上进行相应的配置即可。配置如下:
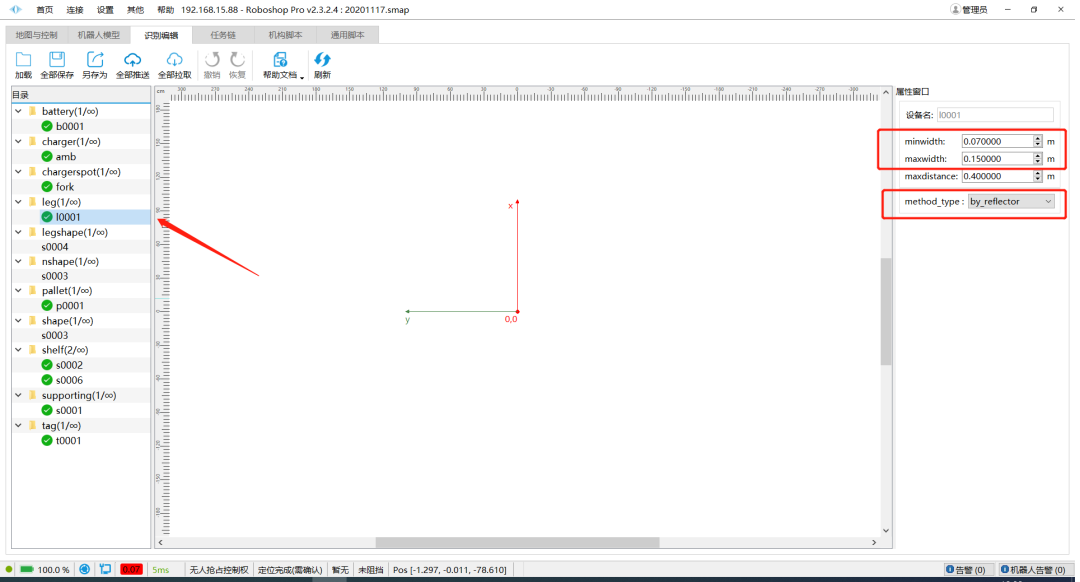
首先在识别编辑中找到leg目录下的l0001文件,见上图红色箭头指向的部分;接着在上图右侧的method_type选择为by_reflector,并配置minwidth和maxwidth两个参数,这两个参数为设置反光贴的最小和最大宽度,只有识别到这个范围内的反光贴才进行跟踪;在设置完之后需要点击全部推送才会将参数同步到AGV的控制盒中。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号