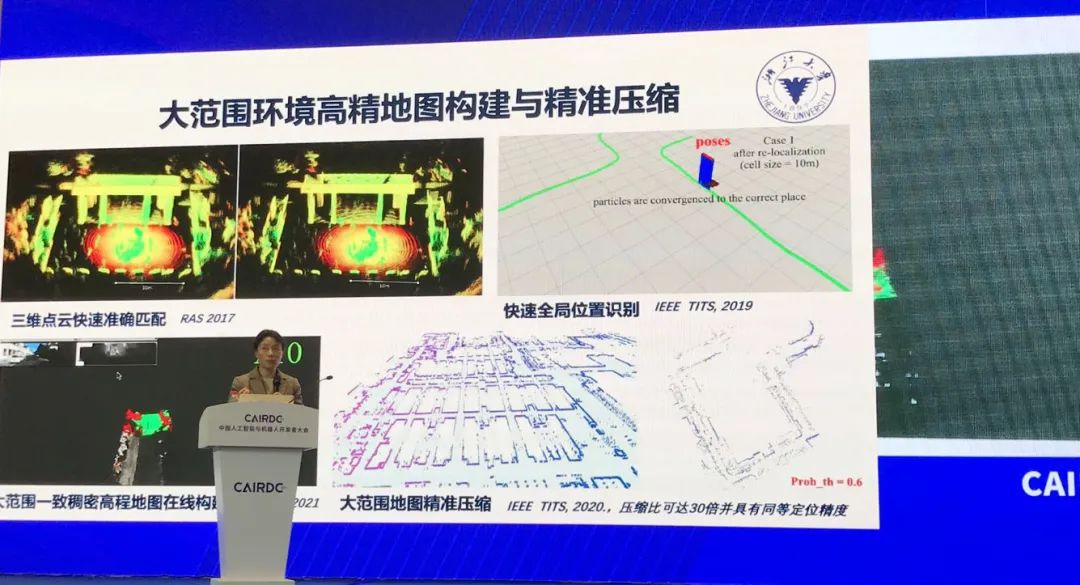
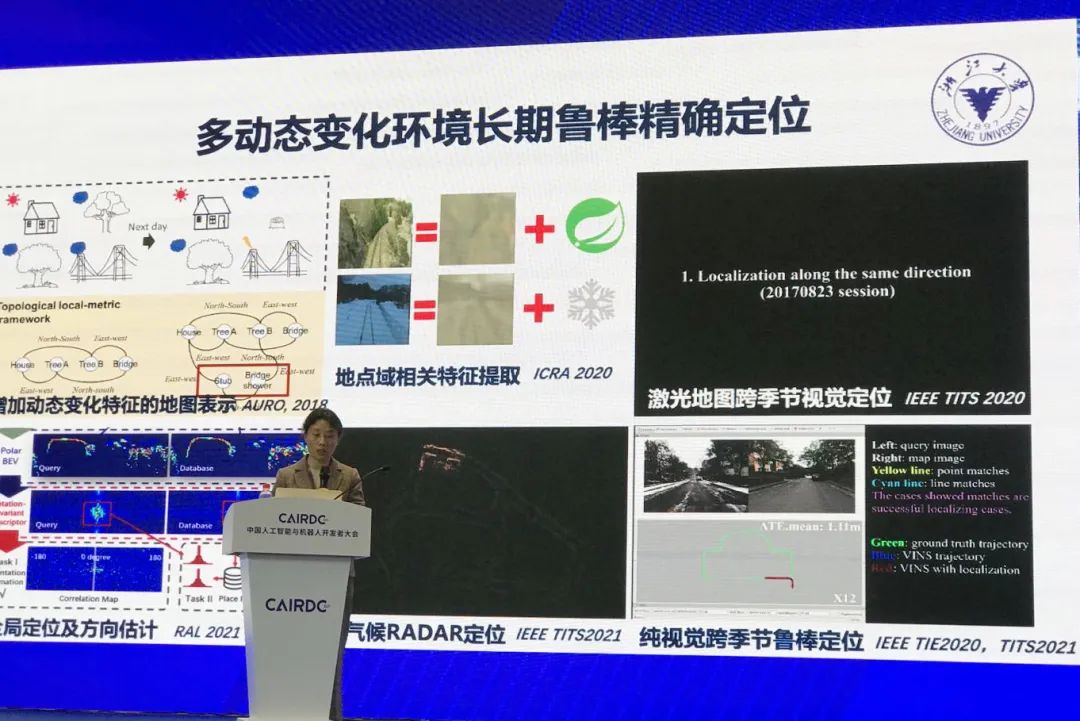
还有一个工作,在我们建立的大范围地图内,还要能够满足高精度定位的要求,大范围、高精度伴随的数据量非常大,在工业、航空航天等应用中,机器人能够带的计算设备往往是有限的,特别是像航空航天方面,就是486的水平,那么这样大的数据量对存储和计算都提出了很高要求,我们在这里做的就是怎么去对地图做精准的压缩,做到了可以压缩30倍,同时还能达到同样的定位精度。在地图构建的基础上,第二个关键问题就是定位。定位也是有多种的技术途径,在室外像无人驾驶等很多在用的是GPS,但是在室内包括在园区、绿化建筑物比较密集的地方,GPS的信号是非常不稳定的,室内根本是没法使用的,所以在室内应用中,一般用的是磁钉、磁条、二维码标识的方法。对于自然导航来讲,我们要去解决的就是当前环境感知发生变化时,怎么去找到环境和地图之间的正确匹配。特别是如果是用视觉的话,会面临季节性变化,气候变化等,雪前雪后的图像是完全不一样的。我们近几年的工作就主要围绕着怎么去适应环境的动态变化,特别是这种长周期的、季节性的、气候性的变化,来实现在环境中的长期鲁棒精确定位。我们提出了新的地图表示方式,当环境变化的时候,解决把新的环境特征如何加入到地图里,使得它下次能够被使用来进行定位,从而避免光照、气候、季节变化带来的纹理上的影响;同时我们解决了异构传感器信息匹配问题,可以在激光地图里进行视觉定位,能适应春天构建的地图,夏天、秋天、冬天,特别是冬天雪后图像发生极大变化,也能正确定位;也解决了纯视觉定位,即在视觉特征地图中进行视觉定位,实现了在大雪前后存在大概90%的错误视觉特征匹配的情况下,机器人也能鲁棒估计定位的结果。
在导航规划方面,已经有了丰富的研究成果,形成了经典的导航规划方法,在工业等领域发挥了很大作用。但是传统的方法,在环境适应性方面、人机共融方面,都有很多的局限性,同时强依赖于前面所讲到的定位,如果定位准确性不高的话,也将直接影响到导航规划的结果。近几年我们从如何去模拟人的角度上来进行导航规划及行为决策上的研究。一个工作是能否学习人的行为,人在驾驶车时依靠手机APP的粗定位以及告诉你是前进、左转、右转的粗规划,就能够根据眼前的场景,来实现安全的驾驶。我们利用行车记录仪的数据,利用他的行车轨迹,对视觉图像进行自动的标注,然后利用所提出的神经网络方法实现了同样的效果,在我们的校园环境中进行试验,即使是到一个新的环境里,机器人靠这样的粗定位和粗规划,也能够实现安全的驾驶,并且能够适应环境中动态移动的障碍物。同时我们也在无人驾驶加速、减速、变道等行为决策,以及如何学习人的社交性规则进行导航规划方面,做了一些工作。目前我们一些技术已经在实际应用场景中实现了验证,包括我们2017年和京东联合发布的618校园送货机器人,我们是唯一一台不依赖于GPS定位,在校园里可长周期自主移动的机器人,也用到了奇瑞的园区自动停车方面,园区内GPS信号非常不稳定,通过我们的技术实现了平滑的准确定位,也实现了从室外到地下车库的自动驾驶,同时在双足、四足机器人上均有应用。

我们也实现了产业的应用,孵化了迦智科技,提供面向智能制造行业自然导航搬运机器人,依靠自身的感知实现定位导航,可以有效适应像半导体、电子制造工厂的柔性制造需求,应用在中兴通讯、中车、天马等3C、半导体企业的工厂里,最近在两会期间的CCTV-2报道里也出现了我们机器人的身影。

在园区级中低速重载无人驾驶的应用方面,我们的定位精度和对精度都达到了国际领先水平,实现了室内室外的通用,不依赖于GPS,在园区环境里实现长期运行,目前已经在几个单位运行了1年多,经历了雨雪等各种气候以及高磁环境的考验。

目前,我们也在做一些新的研究,一个是异构的多机器人协同,结合5G实现的大带宽通信,我们可以有更加丰富的信息交互,如何融合5G进行多机器人的规划、多机器人的信息交融等,我们也做到了通过空中机器人图像来实现地面机器人的定位。

针对机器人操作学习方面,我们也进行了一些攻关。包括在动作上如何进行拟人化的学习,利用我们所提出的机器人学习方法,实现YUMI机器人学习人的手语动作,并保障机器人动作的流畅性、仿人性和安全性。我们之前做的是对乒乓球这样一个快速飞行球的识别和轨迹预测,在现实中还有很多物体是不均匀的、是异形的,我们很难去对每一个都建立准确的模型,然后来进行观测、预测,在这里我们也是设计了新的神经网络,并且实现从一个物体的学习迁移到不同物体上面。目前做到了准确预测位置,下一步还要做到去预测它的姿态,来能够实现抓取,我们也从对物体的抓取拓展到抓推等多种动作的融合上,从而适应更为复杂的场景。

另外,我们也研究了任务级的操作学习。通过识别操作人员是用了什么样的动作、操作了什么样的物体,达到了怎么样的装配效果,部件之间的装配关系和装配的精度要求,来生成机器人的程序,可以实现避免人工对作业的编程,而是用演示的方式自动生成相关的程序。

同时,我们也在把移动和操作结合起来,并且考虑人机的协同。通过人稍微施一点点力,机器人能够感知人的搬运意图,跟人来形成协作,以及在协同搬运的过程中,实现协同、避障、搬运等更为复杂的多级任务。
熊蓉教授研究团队成员
王 越副教授 研究方向:自主移动、无人驾驶
朱秋国博士 研究方向:腿足机器人陆豪健百人计划研究员研究方向:微型软体机器人、医疗机器人















 粤公网安备 44010602004352号
粤公网安备 44010602004352号