
▲在太空中使用的维修和观察末端执行器(Canadarm2闩锁末端执行器)

▲在复制人用力闭合式末端执行器方面进行的高度复杂的尝试
附录:
伯努利抓手(Bernoulli grip)
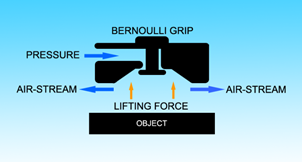
▲空气流动会在物体上产生提升力,从而实现非接触式附着
一个伯努利抓手其用途是通过气流改变气压差差生吸附力来接触被抓取的对象。这种抓手依靠伯努利气流原理。高速气流的静压低。通过精心设计,高速气流中的压力可以低于大气压。这会在局部压力较低的一侧的法线方向上对对象产生合力。伯努利抓取器通过在抓取器表面保持与环境压力相比的正压力来利用此优势,同时在抓取器和被夹持物体之间保持气隙(非接触)。
商用伯努利抓手通常用于处理硬质片状材料,例如硅晶片在电路板的制造,或光伏电池组件。由于握持件是非接触式的,因此这种握持形式适合于处理无菌材料,以防止化学和/或生物污染。已经进行了有关在食品加工过程中使用伯努利夹持器运输样本食品的研究,尽管这项工作发现困难,因为柔性食品会振动紧靠抓具,变形并交替阻塞抓具,或者被吹离气道。伯努利抓地力也正在被研究为攀岩机器人的非接触式粘附机制。
(备注:(以上部分资料来自维基百科)














 粤公网安备 44010602004352号
粤公网安备 44010602004352号