ApexNav
An Adaptive Exploration Strategy for Zero-Shot Object
Navigation with Target-centric Semantic Fusion
在智能家居、仓储物流、甚至未来家庭助手中,有一个看似简单却极具挑战的任务:“去帮我拿一下沙发上的遥控器。”
对人类来说,这轻而易举;但对机器人而言,这意味着它必须在从未见过的环境中,理解“遥控器”是什么,并自主探索、定位、最终抵达目标——这就是零样本物体目标导航(Zero-Shot Object Navigation, ZSON)。
然而,现有方法常陷入两个困境:
效率低:在空走廊或白墙前“发呆”,反复推理却不敢前进;
容易被骗:把一个长得像微波炉的烤箱当成目标,直接“认错人”。
项目主页:https://robotics-star.com/ApexNav/
针对上述问题,《ApexNav: An Adaptive Exploration Strategy for Zero-Shot Object Navigation with Target-centric Semantic Fusion》提出了一套兼具高效性与鲁棒性的导航框架,在多个主流仿真基准上实现SOTA性能,并成功部署于真实移动机器人平台。
01
🧠 灵感来自人类:会“切换模式”的智能导航
研究团队观察到:人在找东西时,会动态调整策略。
当看到疑似目标(比如厨房里有个白色方块),我们会走近、绕一圈、多角度确认——这是谨慎验证;
当身处陌生走廊,眼前全是门和墙,我们会先快速走完一圈摸清布局——这是高效探索。
ApexNav 正是将这种“人类智慧”编码进了算法。
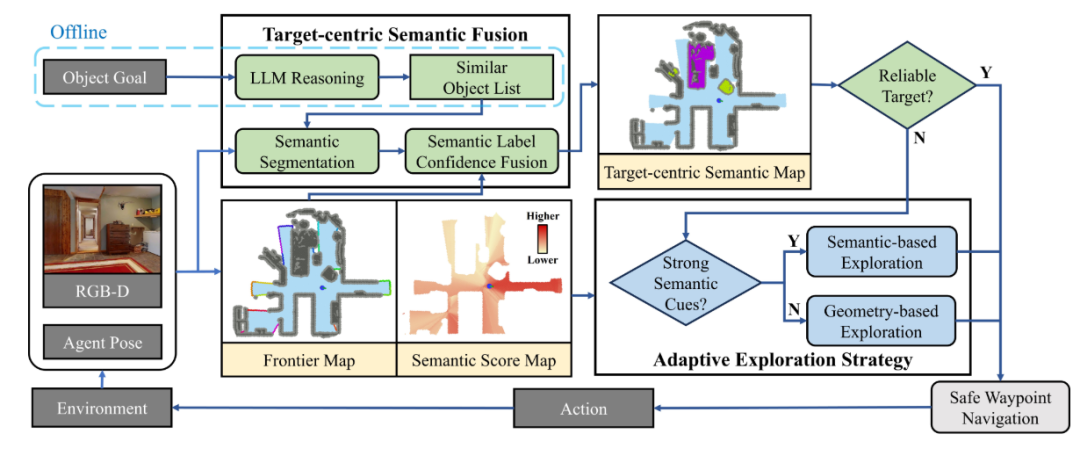
01.自适应探索策略
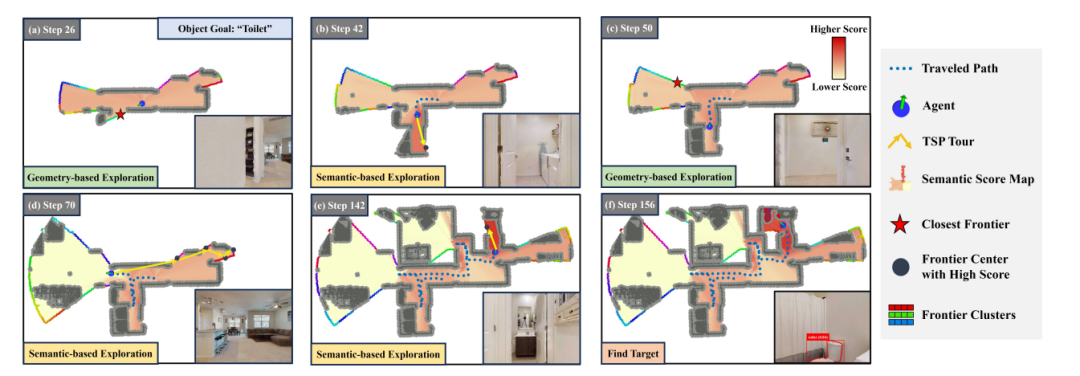
•模式判别准则:对当前前沿区域(frontiers)计算语义得分分布的统计特征(最大值/均值比 r 与标准差 σ)。若 r>τr 且 σ>τσ,判定为语义富集区,启用语义模式;否则进入几何探索模式。
•语义模式优化:将高语义得分的前沿点建模为旅行商问题(TSP),通过求解近似最优路径,实现全局有序的语义区域遍历,避免贪心策略导致的振荡行为。
•几何模式设计:采用最近前沿优先策略,最大化地图覆盖率,加速环境结构构建。
该策略有效平衡了目标导向搜索与环境探索之间的张力,显著提升路径效率。
02.目标中心语义融合
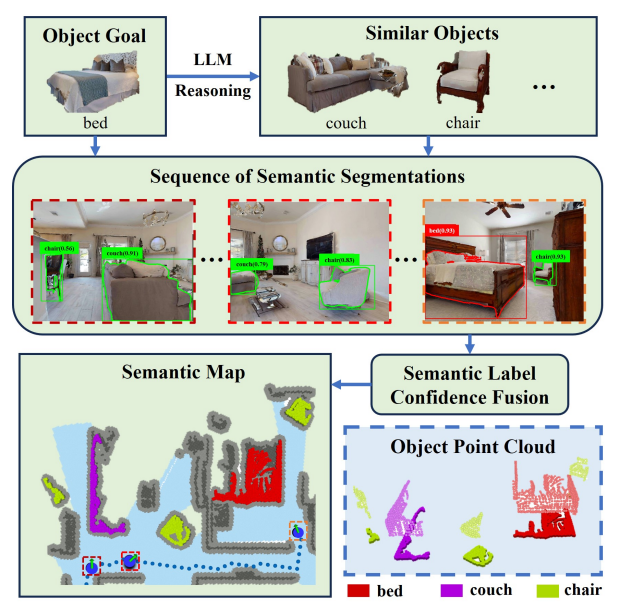
为提升目标识别的鲁棒性,ApexNav构建了一个上下文感知的多帧融合机制:
混淆集预推理:利用大语言模型(LLM)生成与目标类别在视觉或功能上易混淆的物体集合(如“微波炉” → {烤箱, 打印机, 小冰箱}),并对所有候选对象进行长期跟踪。
加权置信度融合:融合多帧观测时,不仅考虑检测置信度,还引入点云体积作为可靠性权重(体积越大,观测越完整,权重越高)。
消失惩罚机制:若某物体在连续帧中未被观测到,其累积置信度按指数衰减,有效抑制偶发高置信度误检。
自适应判定阈值:基于目标物体的典型尺度,由LLM动态设定识别阈值,实现细粒度决策控制。
该融合机制显著增强了系统在杂乱、遮挡及相似物干扰场景下的判别能力。
02
🤖 从仿真到现实:真机实测成功!
研究团队将 ApexNav 部署在 AgileX LIMO移动机器人上,在真实宿舍与实验室环境中完成了多项任务。
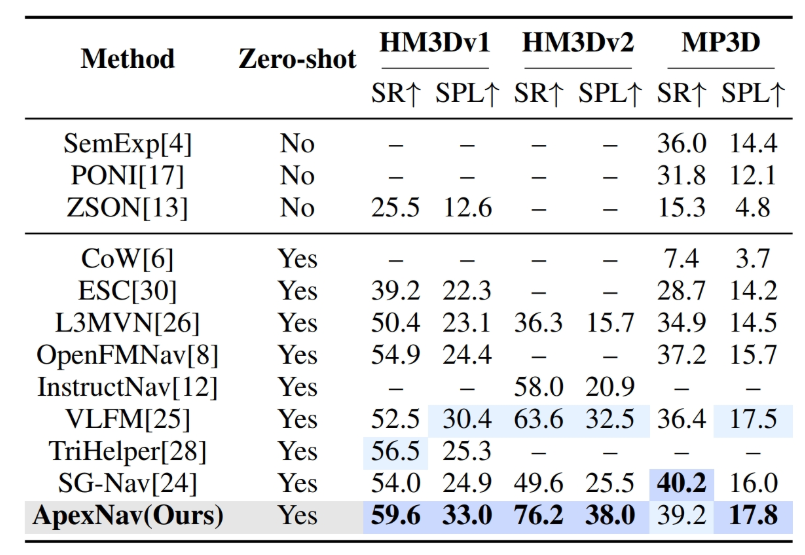
仿真评估
数据集:HM3Dv1、HM3Dv2、MP3D
指标:成功率(Success Rate, SR)、路径长度加权成功率(SPL)
结果:
在 HM3Dv2 上,SR 达68.5%,SPL 为 54.2%,分别超越前SOTA方法 19.8%和 16.9%;
消融实验表明,移除自适应探索或语义融合模块均导致性能显著下降,验证了各组件的有效性。
真实世界部署
平台:AgileX LIMO移动机器人(搭载RGB-D相机与SLAM系统)
任务:在未建图的宿舍与实验室环境中执行“找马桶”“去沙发处”等指令
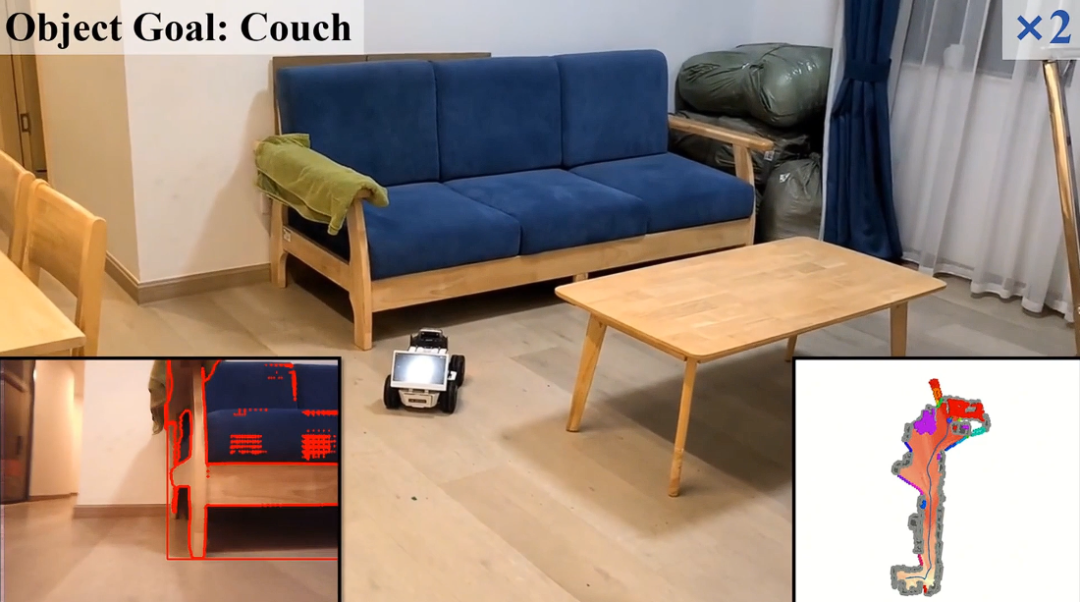
表现:系统在无任何场景先验条件下,稳定完成导航任务,验证了算法的可迁移性与实用性。
03
✨ 启示与展望
ApexNav 的核心贡献在于将认知启发式策略转化为可计算的工程框架:
其自适应探索机制为开放世界导航中的探索-利用权衡提供了新范式;
标中心融合策略展示了如何结合LLM常识推理与多模态感知,构建鲁棒的高层语义理解模块;
整体架构不依赖端到端训练,具备良好的模块化与可解释性,便于在实际系统中集成与调试。
该工作不仅推动了ZSON任务的性能边界,也为具身智能在开放、动态、未知环境中的可靠部署提供了重要技术路径。
松灵机器人成立于2016年,是全球领先的机器人底盘制造商和移动机器人系统解决方案服务商。目前,松灵机器人已经拥有多款适用于不同地形的室内外移动机器人底盘,在载重、续航、速度、运动模式等不同需求场景下实现全矩阵覆盖。同时,松灵机器人还推出了自动驾驶解决方案,平行驾驶解决方案,机器人科研教育套件等移动机器人底盘配套产品,帮助客户在自动驾驶、机械控制、计算机、车辆等领域完成实验验证。
凭借领先的研发技术,松灵机器人已经与包括阿里巴巴、华为、本田、中建三局在内的30多家行业领军企业,以及中科院、清华大学、南方科技大学、北京理工大学、新加坡国立大学、纽约大学等国内外50多所顶尖学府开展了深度合作。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号