
在矿业、建筑和农业等行业中,装载机作为重型设备的核心,其作业效率和安全性直接影响到生产进度和工人安全。然而,传统的装载机操作依赖人工判断,不仅效率低下,而且存在诸多安全隐患。为了解决这些问题,科聪开发了一种基于传感器融合技术的料堆识别技术,并成功克服了传感器数据干扰抑制、多源数据融合精确度提升、车载坐标系统误差最小化以及实时动态环境适应性调整等一系列技术挑战。
料堆识别
SOLUTION
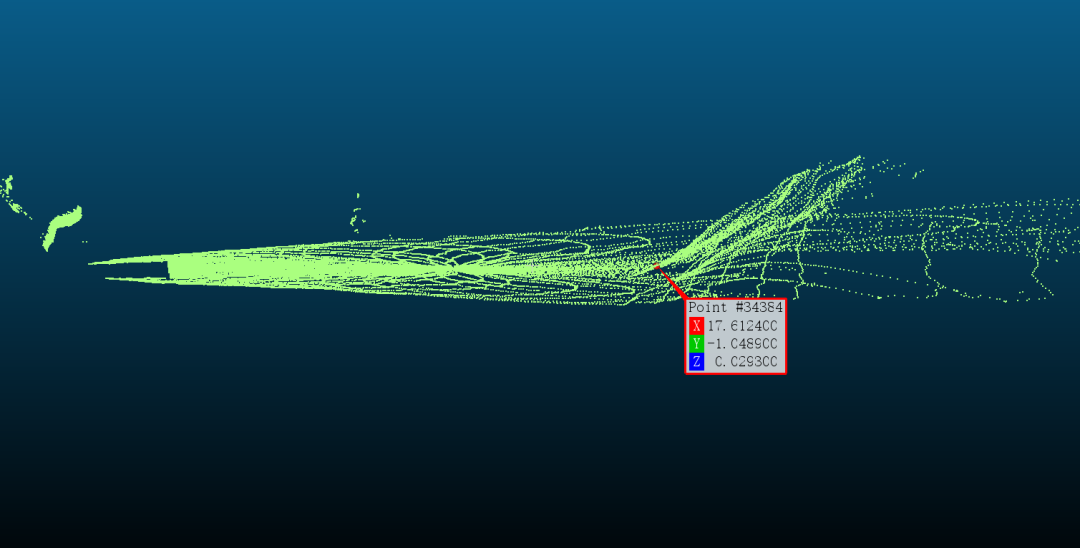
高精度深度点云数据的获取与处理
获取高精度的深度点云数据是实现准确料堆识别的基础。然而,传感器在复杂环境中容易受到干扰的影响,导致数据不准确。为此,科聪采用多传感器融合技术,结合激光雷达、深度相机等多种传感器的数据,提高了点云数据的精度和鲁棒性。同时,通过直通滤波和法向量过滤等算法,有效去除地面点和其他干扰数据,确保只保留有效的料堆点。
车载坐标系下的数据转换与标定
将基于传感器的点云数据准确转换为基于车载坐标系的数据,需要精确的标定和复杂的数学变换。科聪使用鲁棒优化匹配算法,通过激光与地图的匹配,确保深度相机或3D激光雷达的位置和姿态准确无误。此外,采用高效的三维坐标转换算法,确保数据转换过程中的误差最小化。
料堆特征提取与智能决策
从大量的点云数据中准确提取料堆的特征(如形状参数),系统能够判断装载机应进入哪种作业模式。采用前沿特征提出算法进行平面拟合,从点云数据中提取出料堆的坡度和高度特征,根据提取的特征自动判断装载机应进入整理模式还是铲装模式。
实时导航坐标计算与环境适应性
实时计算装载机的整理点和铲装点的导航坐标,要求系统具备高实时性和准确性。我们设计了高效的计算框架,优化了数据处理流程,确保在有限的时间内完成复杂的计算任务。同时,系统能够根据实时环境变化动态调整导航坐标,确保装载机的作业路径最优。
不同作业环境下(如矿山、拌合站、工程建设等),料堆的形状、大小和分布各不相同,系统需要具备良好的环境适应性和可靠性。科聪开发了自适应算法,能够根据不同的作业环境和需求进行调整,确保系统在各种环境下都能稳定运行。此外,在关键部件上采用冗余设计,提高系统的可靠性和容错能力。

科聪多年来深耕于移动机器人导航控制系统研发,致力于为移动机器人运动控制提供创新解决方案。针对不同行业的特定算法需求,不断进行创新开发和应用实践,为低速无人驾驶车辆的导航决策、功能拓展提供了精确且可靠的技术支持。科聪持续为行业提供先进的产品服务和技术,助力客户在移动机器人领域实现突破和发展。
关于浙江科聪
科聪是移动机器人控制系统行业领军者,同时也是国产标准化移动机器人控制系统先驱者,总部位于浙江杭州。科聪在移动机器人精准定位、动态路径规划、精确轨迹导航、多驱运动控制、自主可编程开发等方面处于全球领先水平,为千行百业提供可靠、稳定、灵活、易用的技术、产品、服务和整体解决方案。
科聪专注于移动机器人控制产品,在中国深受信赖,更跨越国界,服务于世界各地的客户,业务覆盖亚洲、欧洲和美洲,在全球有超过1500家合作客户。
科聪赋能仓储物流、汽车、3C、电子、通讯、能源、航空、航天、交通、医药、仪器仪表、食品饮料、化工、农业、环境、安防、教育等行业客户,引领移动机器人的未来,构筑智能世界。
浙江科聪是国内领先的机器人核心控制系统和整体解决方案提供商。公司成立于2015年,位于美丽杭州的钱塘江畔。公司致力于为客户提供国际一流的机器人技术、产品和解决方案。公司产品广泛应用于无人巡检、仓储、物流、安保巡逻、清洁、工程车辆、农业机械等众多领域。
公司技术实力强劲,拥有移动机器人全方位技术研发、产品化和工程化能力,覆盖机器人技术相关机械、电路、软件、算法、电气、整机集成交叉学科全领域。核心团队成员均为从业10年以上的机器人、自动化和人工智能行业技术专家。公司依托浙江大学、清华大学和中国科技大学等国内高校平台,并在国际范围内与美国卡耐基梅隆大学、德国德累斯顿大学、慕尼黑工业大学、美国硅谷的人工智能技术团队达成了伙伴合作关系。公司已掌握智能移动机器人基于多传感器融合的环境学习与精确定位技术、动态路径规划与精确轨迹跟踪技术、移动机器人多驱运动控制技术、基于深度学习与智能云的数据挖掘技术、多智体分布式协作技术、特种环境防护技术与本质安全防爆技术等一系列国内领先国际一流技术。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号