而双差速模组可通过滑环来突破转动范围的限制,从而实现360°的差速转向模块,但单舵轮却无法实现舵轮360°转向。
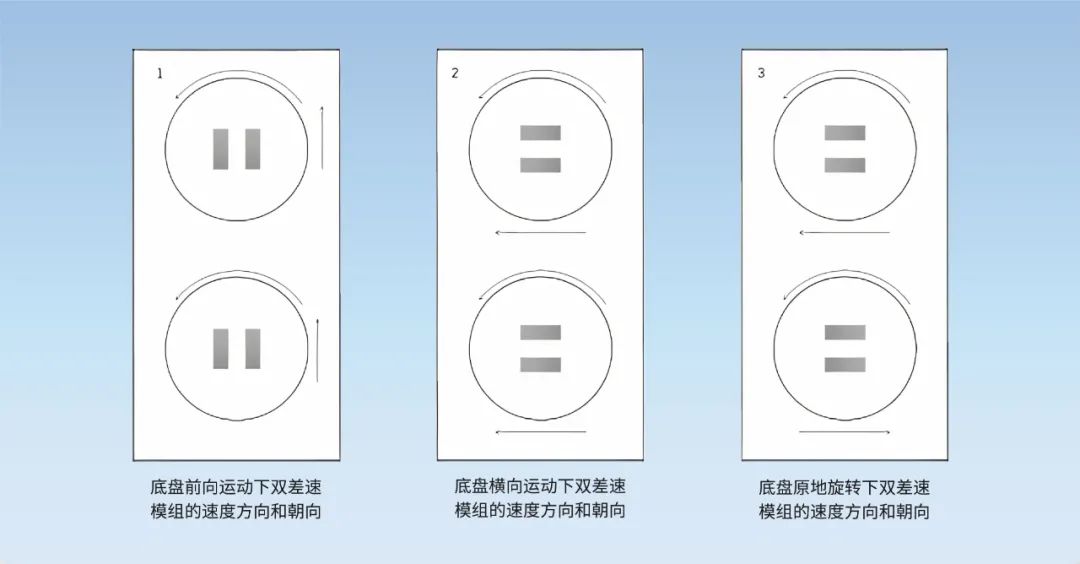
双差速模组底盘运动模型示意图不仅如此,双差速模组还可突破舵轮模组驱动器和机械结构的限制。我们只需将传统的电机驱动器配上含激光建图、定位、导航等功能的 SRC 控制器,即可搭建高精度全向移动的自动控制底盘,从而避免昂贵的舵轮模组驱动器。双差速模组也无需特殊机械结构或轮子,只需把两对差速模组固定在底盘上,并保证差速模组在底盘上能旋转即可,从而避免昂贵的、不耐用的非标轮子。

基于 SRC ,让造车更简单双差速模组由于没有舵轮机构,还可制作超低底盘的搬运车。双差速模组 AGV / AMR 具有灵活的扩展性,即通过增加差速模组的数量(比如四差速模组,八差速模组),来增加车体的搬运能力,并可保持全向移动的特点。双差速模组 AGV / AMR 对轮子的控制,不但要满足车体整体速度的要求,还要满足差速模组朝向和角速度需求,这使其控制难度比双舵轮和麦克纳姆轮 AGV / AMR 要高出许多,但是仙工智能(SEER)在有限的性能条件下优化了控制算法,推出了综合成本更低的差速模组控制系统,助力差速模组更广泛地应用于物流运输领域。仙工智能(SEER)的拳头产品 SRC 核心控制器在增加了双差速模组运动模型后,将进一步扩大基于 SRC 核心控制器可制造的 AMR 类型,让造 AMR 没有门槛。
基于 SRC 核心控制器可制造的 AMR 类型未来,仙工智能(SEER)也将一路披荆斩棘,以标准产品支撑非标应用,为合作伙伴带来更多有价值的新品,为智能物流的发展添砖加瓦!














 粤公网安备 44010602004352号
粤公网安备 44010602004352号