
1
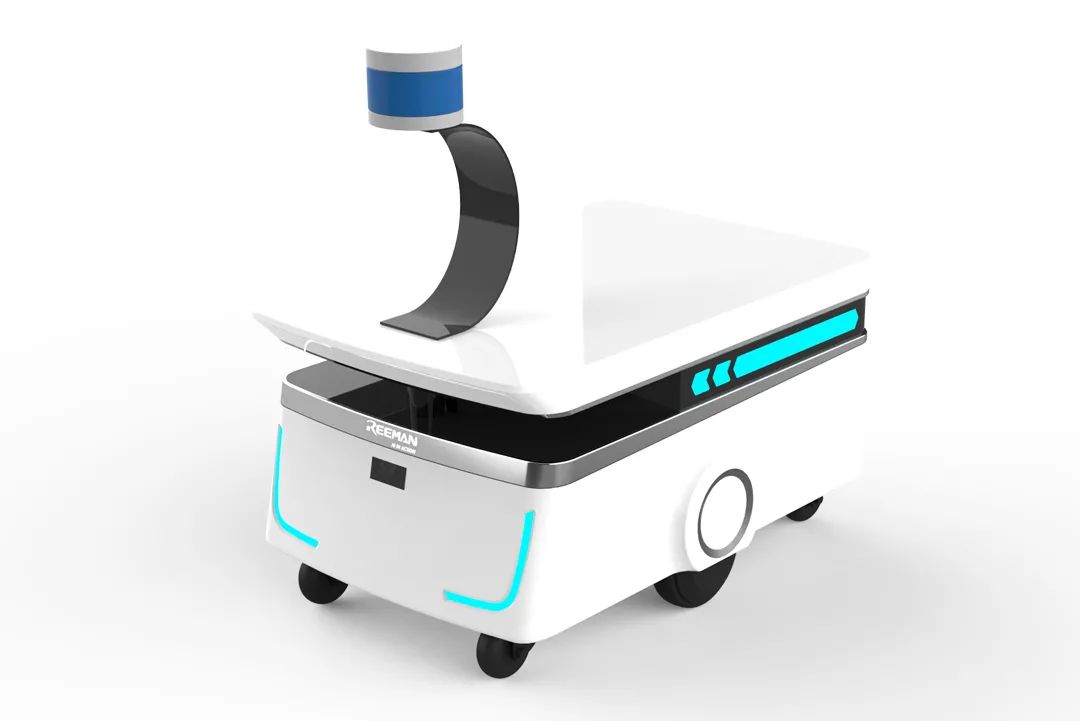
随着物联网、5G、大数据、人工智能等关键技术的加速突破,服务机器人下游应用场景日趋广泛,基于机器人底盘开发的要求十分苛刻,为满足复杂多变的应用环境,锐曼机器人最新推出的多线激光雷达机器人底盘——「中华田园犬」,进一步提升机器人底盘的定位精度和自主避障能力。
一般来说,单线激光机器人在大型场景只能沿墙附近或特征点比较明显的小型区域使用,在一些大型的空旷区域则无法正常运行。
锐曼机器人底盘——「中华田园犬」,采用多线激光、单线激光融合技术,支持3D建模及环境感知,并且有效避免环境光与强日光的干扰,可侦测玻璃等激光易穿透障碍物,在室内外均可稳定使用,最大支持载重80KG,满足多种复杂的场景使用。
视野图
在操作系统方面,锐曼机器人底盘「中华田园犬」采用自主研发RSLAM 2.0系统,在导航算法方面,强化建图、定位、路径规划、避障等功能,开放SDK平台,支持二次开发,为用户提供丰富的API接口。
2
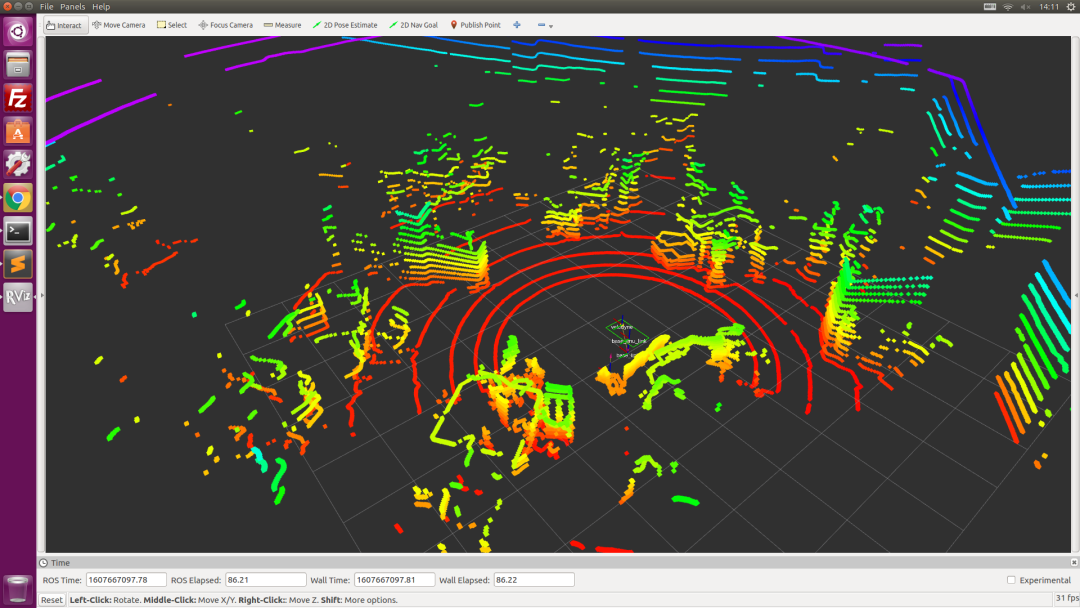
从机器人的实时定位与建图技术来说,锐曼机器人底盘「中华田园犬」的核心算法是基于点云数据来进行定位与建图,其识别能力远胜于传统单线激光,包括环境特征点信息增多以及导航算法的优化。通过使用点云数据构建三维空间地图,实时获取3D全局地图与视野图中的特征点进行比对,优化路径规划算法,实现全局路径规划平滑。
升级后的机器人底盘充分的考虑了安全问题,尤其是在智能避障方面,采用多传感器数据融合算法,使用了RGBD深度相机、超声波、IMU、编码器、单线激光、多线激光点云等,通过多线激光扫描机器人周围环境,精准比对上一帧及下一帧环境的变化,自行匹配当前环境与地图中保存信息的差异,从而快速检测出周围的障碍物及行人。

3D地图
3
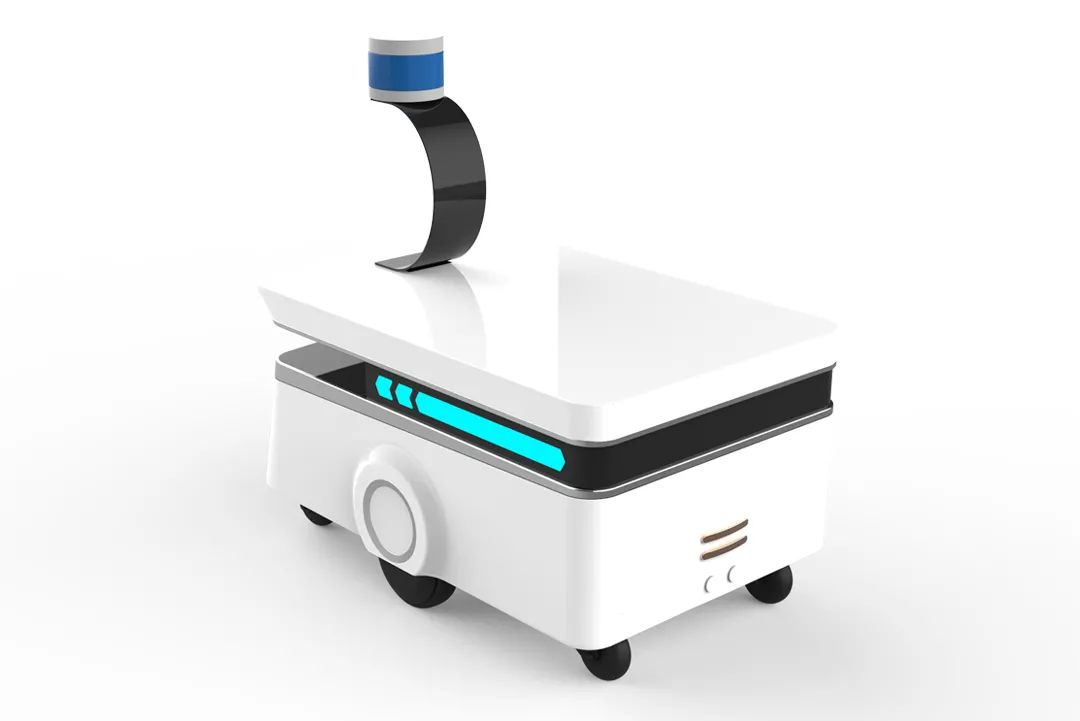
总的来说,多线激光雷达的应用场景相对复杂,锐曼机器人底盘「中华田园犬」所采用的是16线激光雷达,可精准、快速、清晰地勾勒出周边环境的3D轮廓信息,激光测距最远可达200m,并针对镜面、玻璃等物体的识别进行优化,具有安全性高、稳定性强等诸多优势,全方面保障机器人的安全运行,适用于机场、车站、写字楼、商场等大型公共场所。
不同场景对底盘的需求不同,通常服务机器人底盘普遍采用单线激光雷达,锐曼机器人底盘「中华田园犬」创新与升级,是大环境导航定位解决方案的关键所在,采用多线激光+单线激光+RGBD深度相机融合技术,在产品的稳定性、导航定位等方面弯道超车,突破技术壁垒,充分发挥人工智能创新引领与赋能作用,为服务机器人市场带来积极的转变。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号