那么,ROSA和ROS(Robot Operating System,机器人操作系统)之间又有什么区别呢?
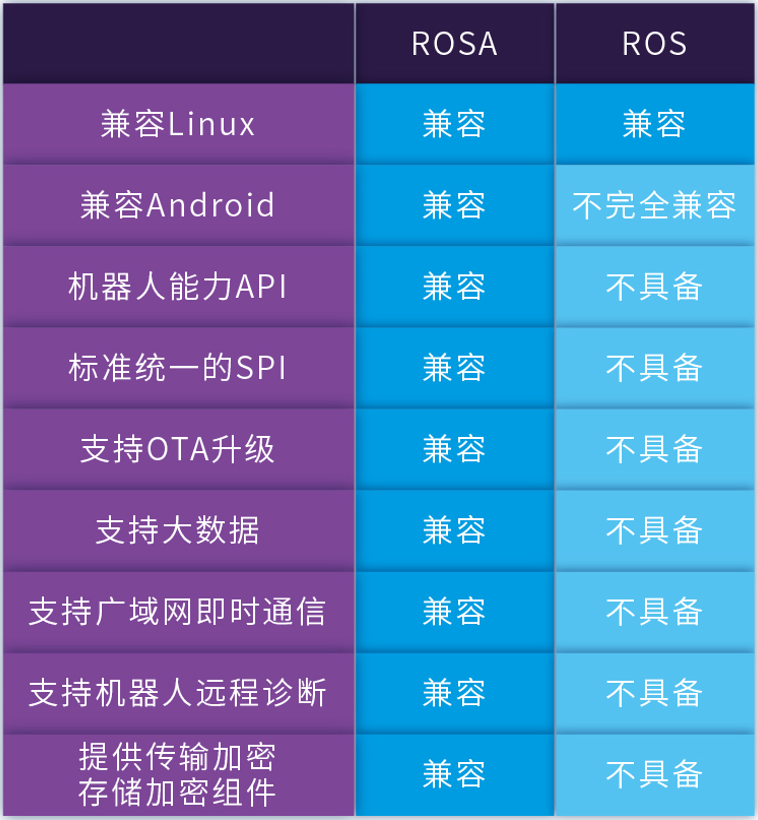
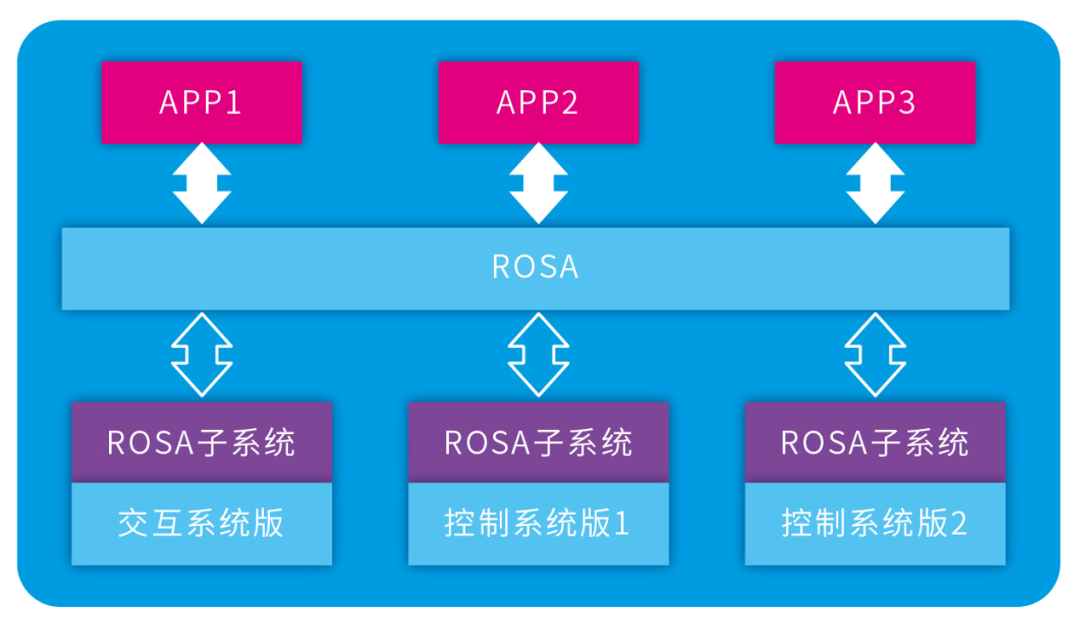
ROSA与ROS的比较ROSA和ROS之间是可调节的关系,在运行层面上,ROSA是可以运行ROS的,也就是说ROSA在ROS的功能之外,又扩展了许多新功能,让机器人更好地服务日常生活。
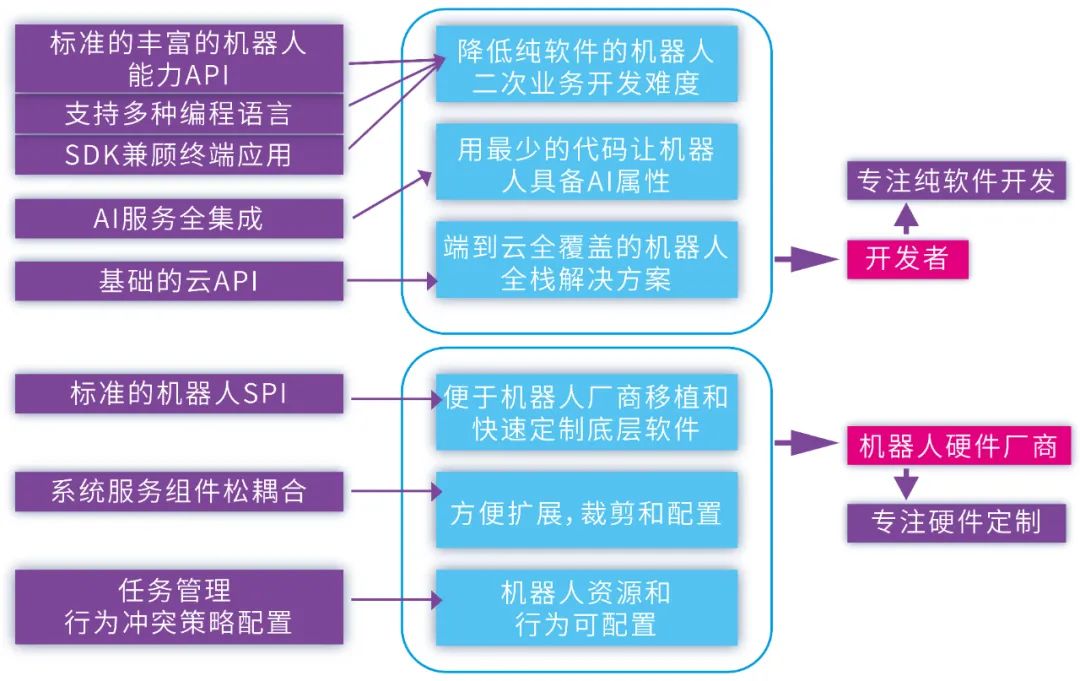
ROSA对开发者和硬件厂商发挥价值ROSA主要对两种角色发挥重要作用,通过机器人能力API、多种编程语言、SDK兼顾终端应用,再加上AI服务全集成、基础云API,让开发者更专注纯软件业务开发,不必细致考虑机器人的各种操控实现;通过标准的机器人SPI、系统服务组件松耦合、行为冲突策略,使得机器人厂商快速移植定制底层的软件,无需考虑软件业务层面的问题。
ROSA在机器人上的应用
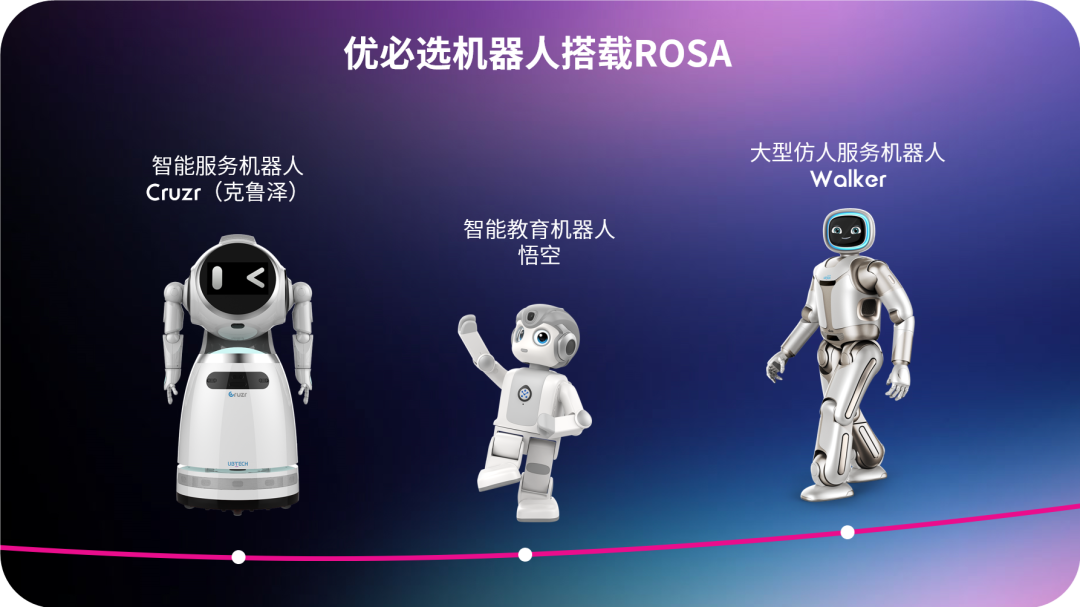
说了这么多理论化的讲解,接下我们看看ROSA在机器人上是怎么应用的。目前,ROSA已经在优必选新一代服务机器人的产品中开发使用,包括智能服务机器人Cruzr(克鲁泽)、智能教育机器人悟空、大型仿人服务机器人Walker,广泛应用于商业、教育、娱乐等多个领域。
当Walker使用ROSA上的ASR,可以对人类用户的语音进行识别,随后通过TTS进行发音对话,同时调用动作API和表情API,实现机器人的技能和应用。这个简单的过程,已经动用了传感器接入、表现力、语音操控和任务决策等好几项能力。

ROSA在Walker上实现ASR、TTS、动作、表情的调用














 粤公网安备 44010602004352号
粤公网安备 44010602004352号