付先平教授表示,水下机器人目标抓取的难度较大,涉及机器视觉、控制科学、流体力学、机械设计及制造等多个领域,需要多个单位参加攻克核心关键科学问题。全国水下机器人大赛已经进行到第4年,凝聚了更广泛的科学力量投入到水下捕捞机器人的设计和开发过程中,对该领域的核心问题的解决有重大推进作用。例如,养殖海洋环境的海底有沙底、水草、礁石等不同情况,抓取目标包括海参、扇贝、海胆、鲍鱼等不同目标,对水下机器人的实际作业带来了极大挑战,需要针对不同的海洋环境设计不同类型的水下捕捞机器人,并进行大规模的实验验证,这些都需要更多的科学研究人员参与,才能完成这个复杂工程。
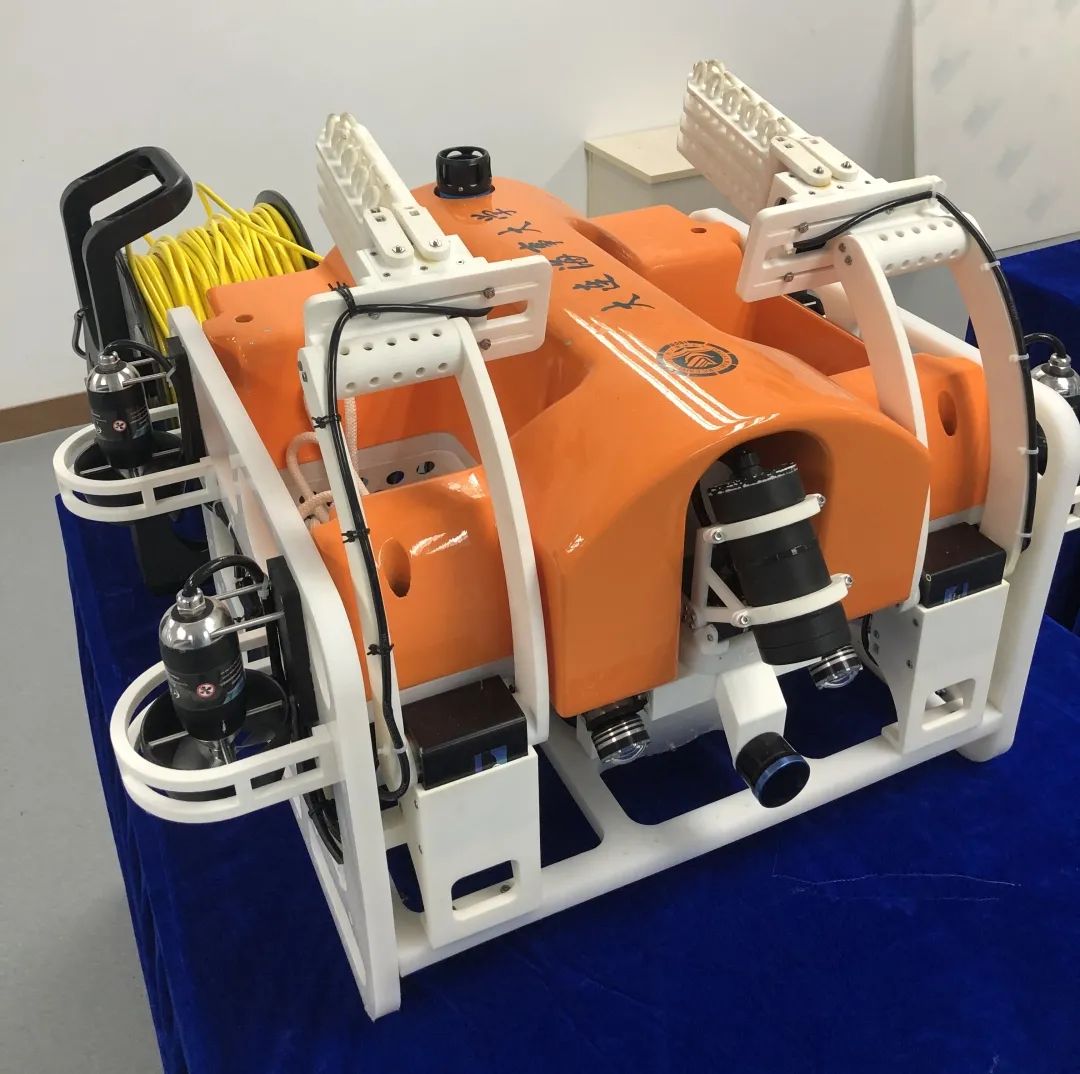
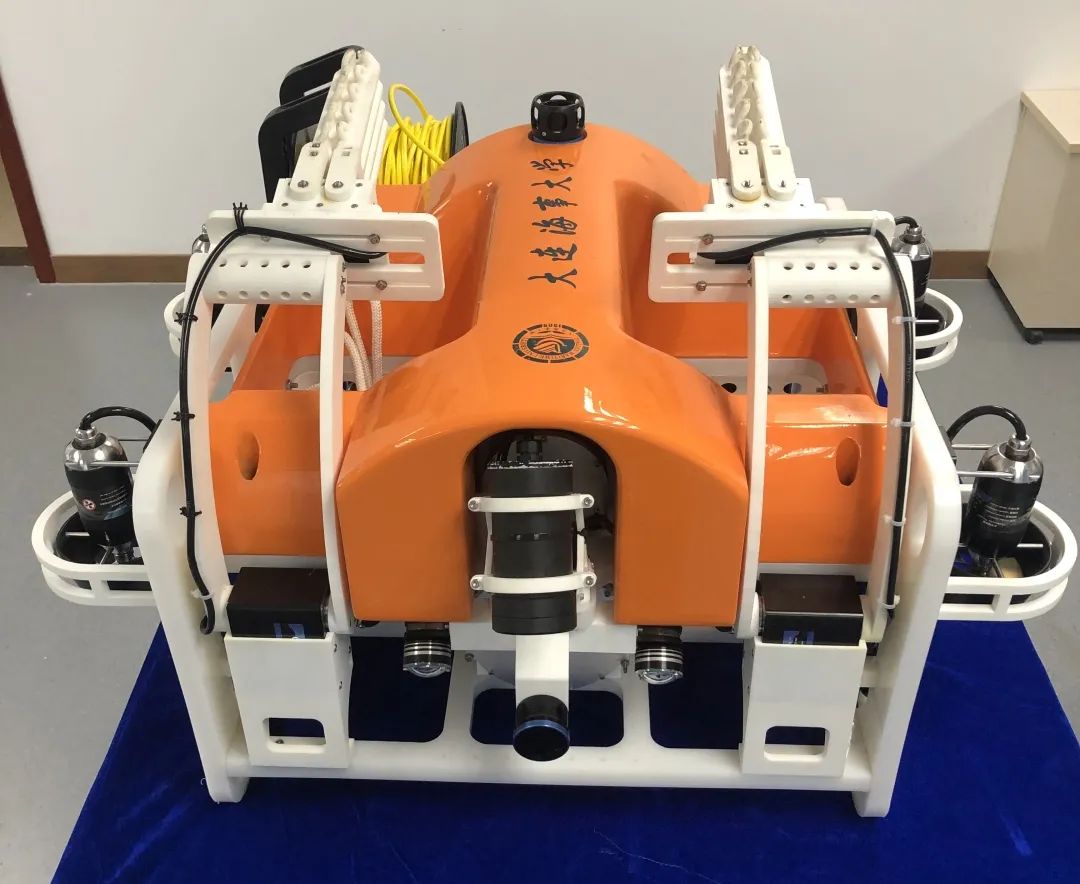
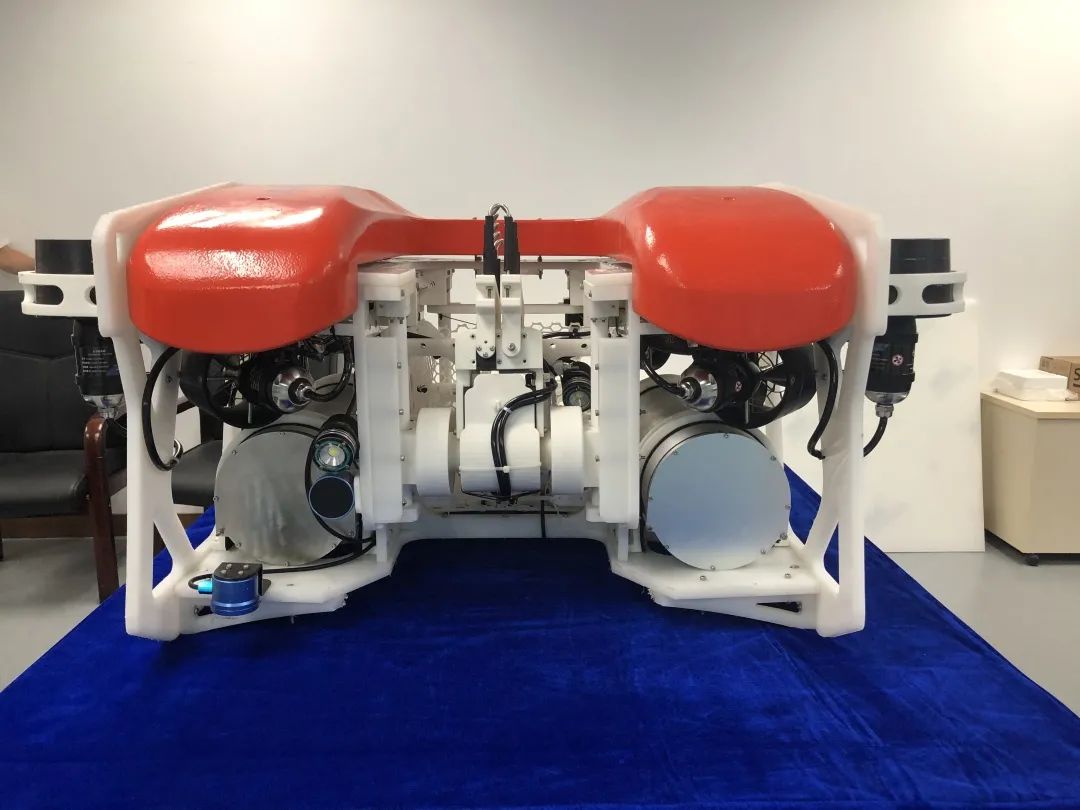
“海狮”号机器人
“海狮”号机器人是大连海事大学研发的第七代水下机器人的改进版,设计改进了机械手抓取的力反馈算法,提高了抓取效率。水下捕捞机器人于2019年被工业和信息化部列为新一代人工智能产业创新重点任务,研发团队是辽宁省“兴辽英才计划”高水平创新创业团队,隶属于大连市水下机器人工程中心。该机器人长640mm,宽600mm,高400mm,重约60kg,最大深度可达300米,最大航速4节,采用4K分辨率摄像机,并加载了图像增强模块。采用最新八轴推进器,可实现各种姿态的点位、直线、圆弧等运动控制,具有更强的稳定性与平衡能力。采用全新双机械手并行抓取模式,巧妙采用弯臂设计方案,大大提高了机械手的抓取效率。机器人内置两个可快速拆卸的网箱,具有一定负载能力。采用内置低功耗的GPU进行实时目标识别,无需利用地面计算资源进行图像处理。集成了水声和光学定位技术完成水下目标的测量,实现水下小目标快速遍历和抓取。适用于水下环境探测、水下目标检测以及海产品的自主抓取等。

“章鱼”号机器人
“章鱼号”是大连海事大学研发的第四代水下机器人的改进版,相比于去年的参赛作品,新型机器人更加灵活精准,特别采用的嵌入式抓取结构,能最大幅度减少悬浮抓取动作对机器人平衡造成的影响,对海产品的识别度也更加精准,根据在真实海域采集的数据分析,“章鱼号”的准确率能达到80%左右。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号