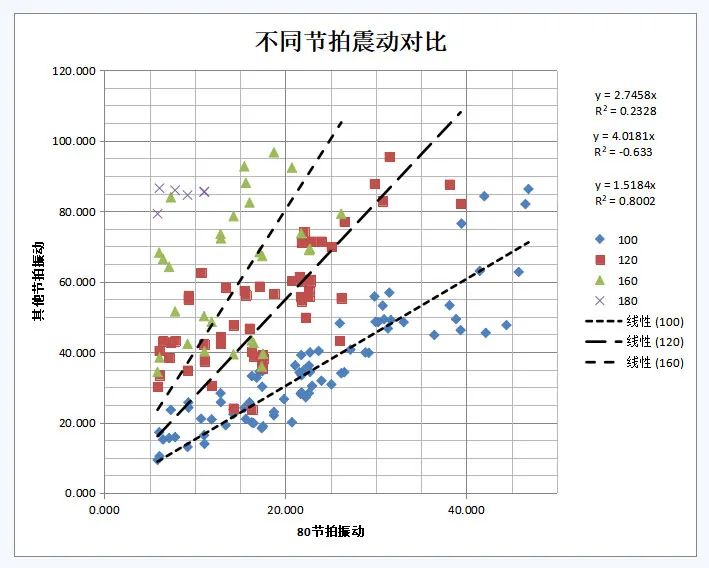
(不同节拍)
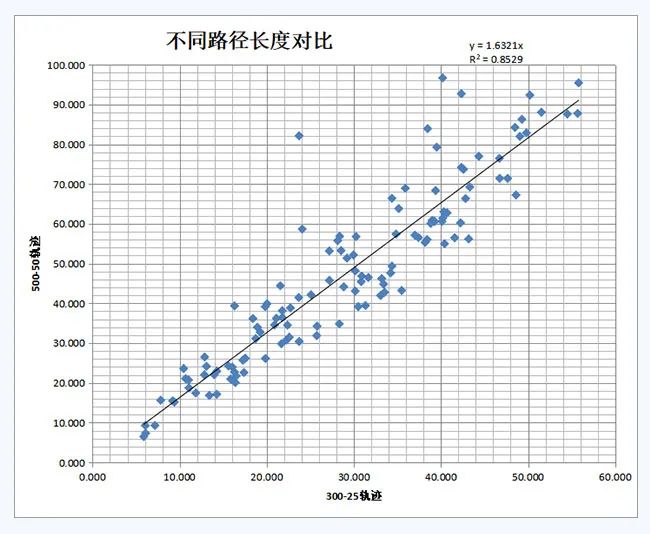
(不同路径长度)
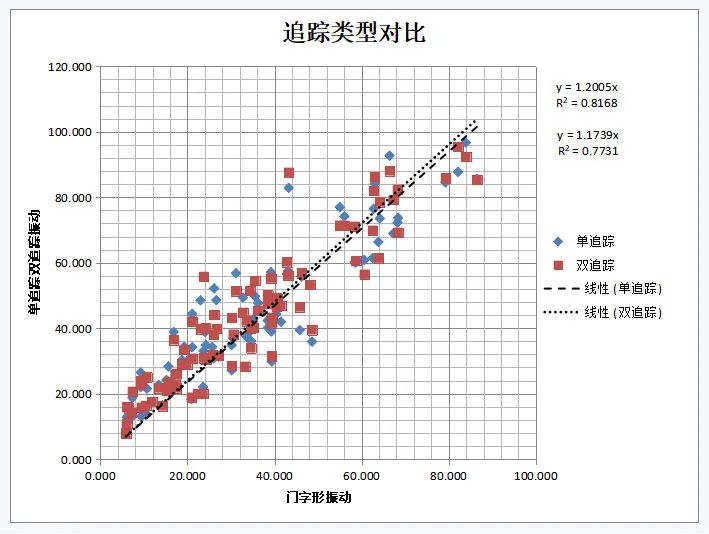
(不同追踪类型)
3、力矩控制:我们还改进了拖动示教算法,优化了拖动示教过程中的力补偿,使拖动过程变得更轻松。同时优化了拖动示教的轨迹跟踪算法,使并联机器人的拖动示教能够真正的进入到行业的生产现场中去。
奥德赛-吾等采石之人,当心怀大教堂之愿景
目前Atom控制器仍然有许多问题亟待解决。我们根据和国际控制器在相同条件下的振动测试对比表格,振动数值的结果还是非常可观的。但是我们在二次开发性上有所欠缺,导致在部分应用场景下应用不够灵活。同时在在不规则运动规律下的跟踪抓取精度不理想。
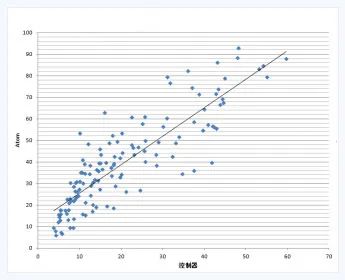
(振对对比)
接下来,我们仍将持续不断的提升Atom自主控制器的性能和功能,使AtomRobot能够适应更多不同的场景、更严格的技术要求。
我们将通过滤波技术的应用,减小机械手在运动过程中产生的振动,从而达到振动幅度降低。将持续优化跟踪运动轨迹,优化跟踪算法进一步缩小跟踪误差,最终提升跟踪精度。建立二次开发平台环境,能够适应更多的应用场景。同时进一步优化用户界面操作,降低用户界面操作的学习成本。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号