“机器人”这一名词是1920年一位捷克作家在一本科幻剧中提出的,到了1950年前后,另一位美国作家阿西莫夫才系统性的提出了“机器人学”这一概念,并给出了著名的机器人三定律。在那之后,从1970年,随着计算机的兴起,现代控制技术、传感器技术的发展,机器人开始了真正的产品化的进程。也正是从那个时候开始,搭载一颗基于CCD芯片摄像头的机器人,可以为人们提供某一时刻的光学影像信息记录,而这也形成了最早期的机器人视觉系统。值得一提的是,1969年美国的阿波罗登月飞船上搭载的正是基于CCD感光芯片的照相机,为机器人视觉系统的硬件架构提供了系统性的参照。由于具备一定的简单的记忆存储能力,那个时候的机器人可以进行简单的重复作业,但是对周围环境没有任何感知与反馈控制能力,我们称当时的机器人为第一代机器人。

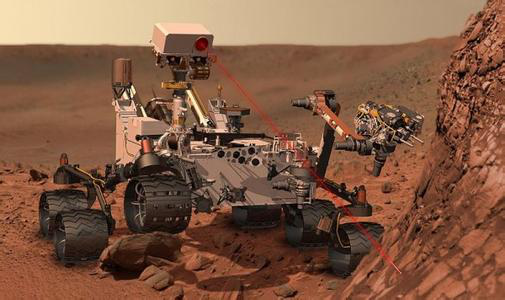
自此以后,世界各国都开始投入到了对移动机器人的研究上,而在这之中,视觉系统更是被公认为是机器人走向智能的核心入口。因为在研究的推进中,人们需要机器人对环境拥有更完善的感知能力、逻辑思维能力、判断决策能力,甚至是根据作业要求与环境信息进行自主的工作。比如美国DARPA在90年代研究的ALV自主车可以选择路标识别实现导航,达到10km/h的移动虚度,还采用了立体视觉、卫星导航等当时的先进技术。2004年NASA研制的火星探测器机遇号与勇气号成功在火星表面登陆,搭载当时最为先进的图像采集与立体视觉技术,帮助探测器在复杂的星球表面完成各项未知任务。而也正是在这样一个时期,三维视觉系统在移动机器人上的重要性被首次提出。
不难发现,从上个世纪六七十年代发展起来的机器人视觉系统,到今天,实际上是建立在不同时期最先进的算法技术和硬件传感器的基础之上的。在视觉系统的算法技术上,通过几十年的发展,形成了用户交互、识别感知、运动决策和数据优化4个层级,分别对应实现体感识别、目标跟随、人眼跟随;地图构建、场景理解、物体识别;定位定姿、自主导航、路径规划;图像优化、深度优化、其他数据优化等诸多今天大家耳熟能详的算法。

我们可以看到,机器人视觉系统一路走来,和光学传感器的演进密不可分。可以说视觉系统几十年的发展史,就是光学传感器的演进史。今天,我们大体将机器人视觉系统中搭载的视觉传感器分为三类:以单线激光雷达为代表的一维线阵传感器,以嵌入式摄像头为代表的二维面阵传感器和以特殊光源为代表的三维深度传感器。其中,以特殊光源为代表的三维深度传感器是实现机器人三维视觉系统的最主要也是最关键的传感器,三维数据的获取质量直接影响了移动机器人后端的算法结果与决策控制。

机器人技术从20世纪中旬发展到现在,也不过数十年。上个世纪,全球机器人技术有两个大国——美国和日本。20世纪70年代前后,美国注重机器人在军事领域应用,而日本注重机器人在工业领域应用。后来在机器人技术民用化的进程中,日本的机器人工业基础实力雄厚,而美国则有更多的“黑科技”。而近两年国内面世的机器人主要针对于家庭陪护市场,面向商用服务领域的机器人少之又少,相对于家用机器人市场,企业商用机器人市场更大,同时对机器人的要求也更高,研发的成本也更高。

品创智能经过几年的技术验证推出了机器人RAPID,它不仅可以在家里满足人们日常生活中的交流需求,也可以在企业中从容应对企业服务上遇到的各种问题。它以卓越的视频音频和网络功能为使用者创建了自由交互的新手段,提供了直观可靠的“替身”体验,语音识别,人脸识别,远程操控,定点控制等等强大的功能让它在除了家庭以外的生产控制,上午,医疗等等领域都能得到很好的应用,它更像一个机器人平台,你想让他成为什么样的机器人他就可以成为什么样的机器人。
















 粤公网安备 44010602004352号
粤公网安备 44010602004352号