我们发现很多客户并没有正确配置 Layout 中的避障区域,只是简单地将车体轮廓放大,以此兼顾避障需求。但实际的避障区域是动态切换的多张地图,并非固定轮廓。这样会导致项目运行时出现死锁:调度系统下发指令允许 A 车通行,但A车因避障区域限制无法移动。这类问题必须人工干预,非常繁琐。为解决问题,项目人员又在Layout中添加交管规则,如此反复,造成售后问题持续不断,最终影响客户满意度。
我们可以通过Layout设置车辆的动态避障区域,这样Auto Blocking计算就会考虑避障区域,就可以避免这种情况的发生。
1 在车辆属性里的Safety System Setup定义避障激光的安装位置。
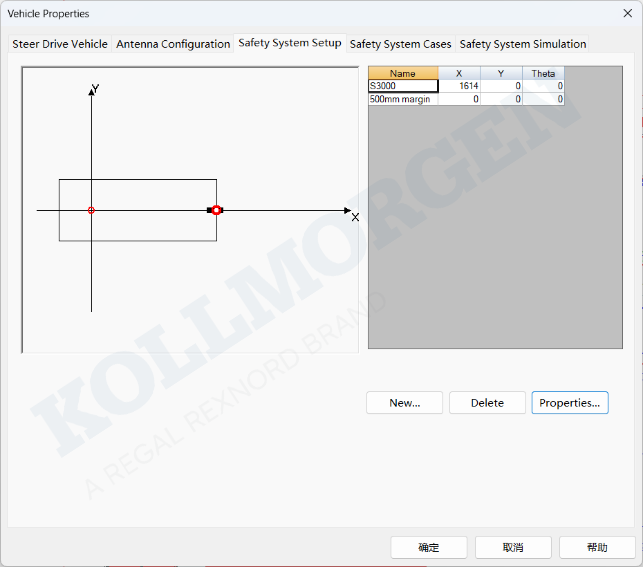
2 选择定义的避障激光S3000,点击属性进入避障区域配置界面。
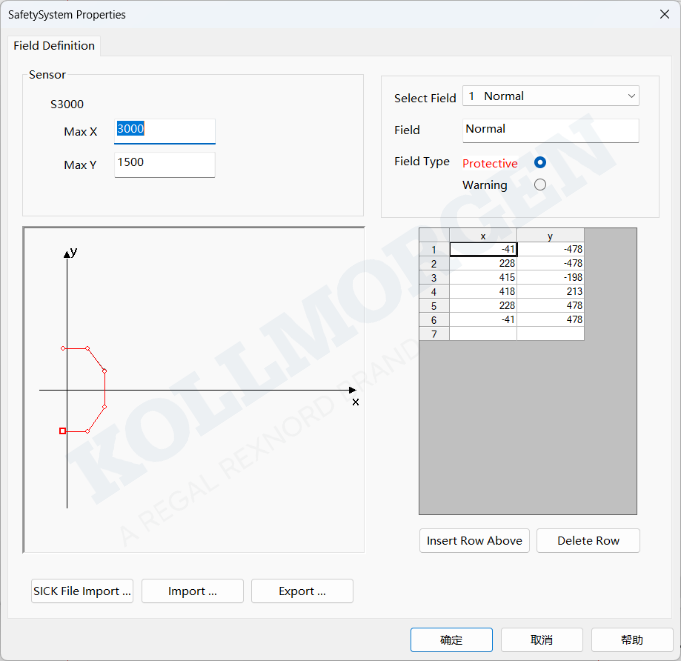
注意:S3000的Max X和Max Y 只是调整窗口显示范围大小。
在这里可以设置保护区域和减速区域。可以手动输入坐标来绘制,也可以通过导入SICK的csv文件进行区域配置。
在这里配置好直行或者转向等避障区域后,进入Safety System Cases界面配置区域的切换条件。
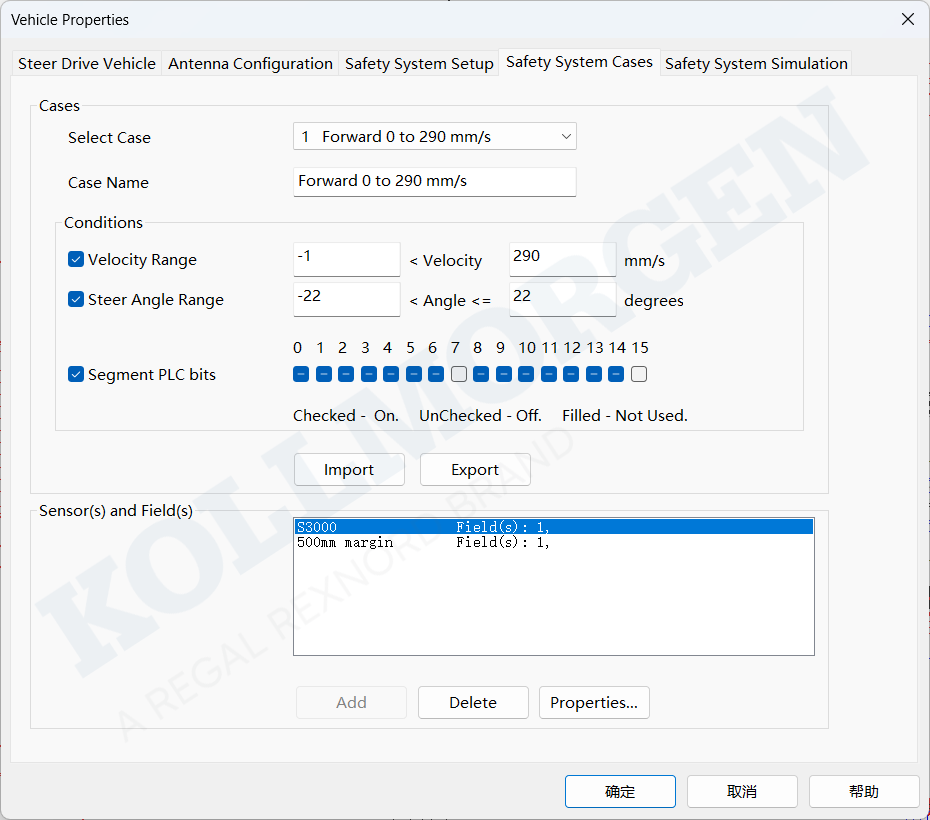
最多可以设置3个条件进行避障区域的切换。
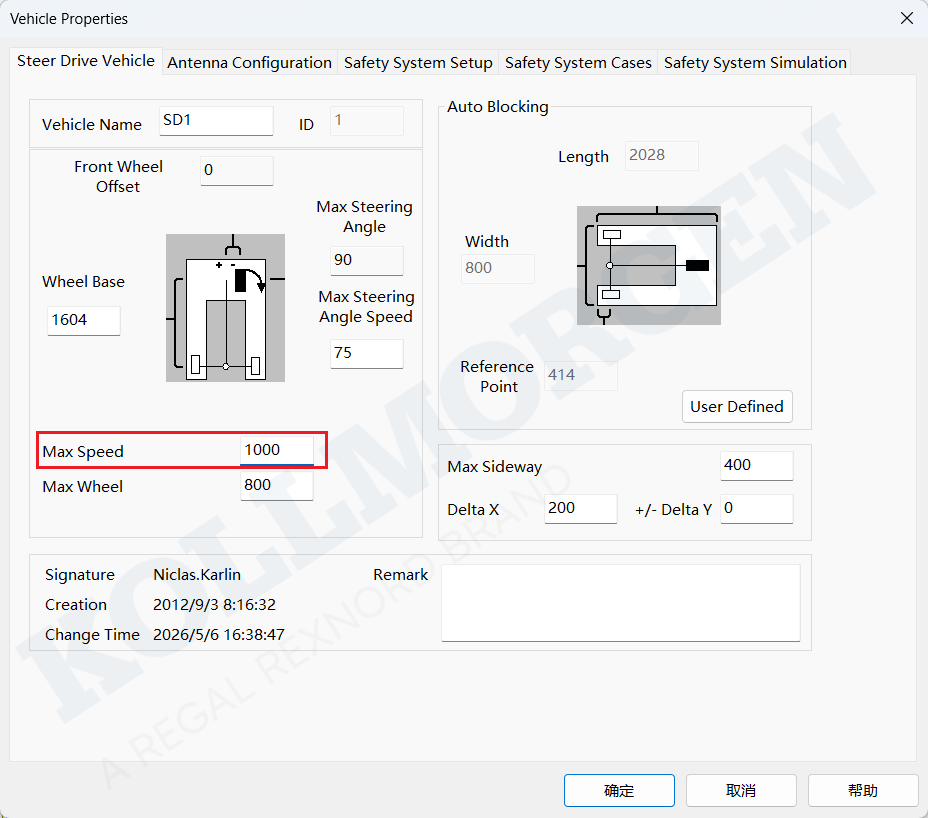
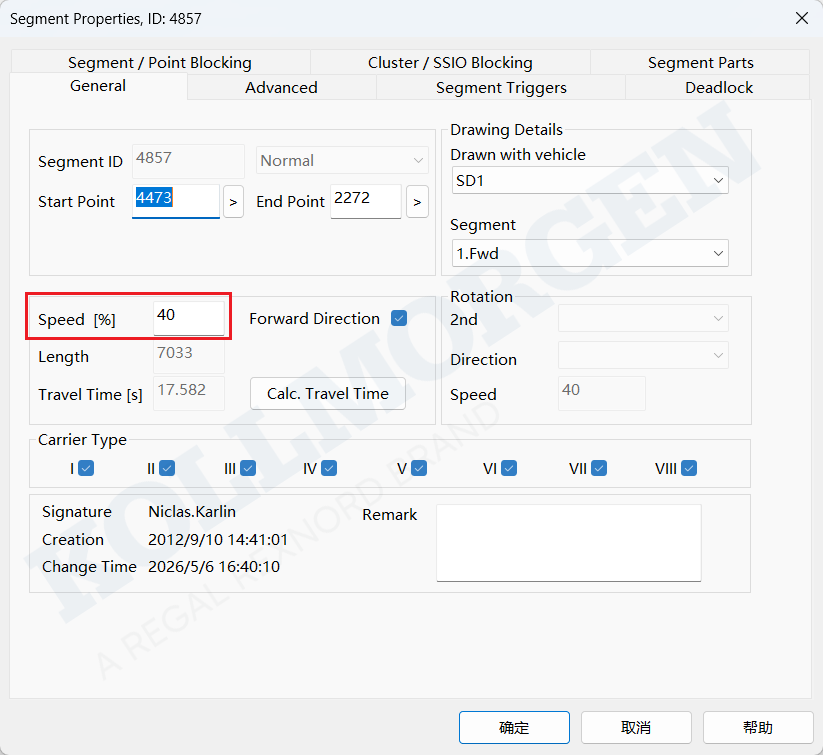
车速切换:这里的速度是在layout里根据车的最大速度和线段允许的百分比速度计算出车的速度。
如果车型最大速度位1000mm/s,一根直线段属性里设置了40%的Speed,计算可得400mm/s的运行速度。
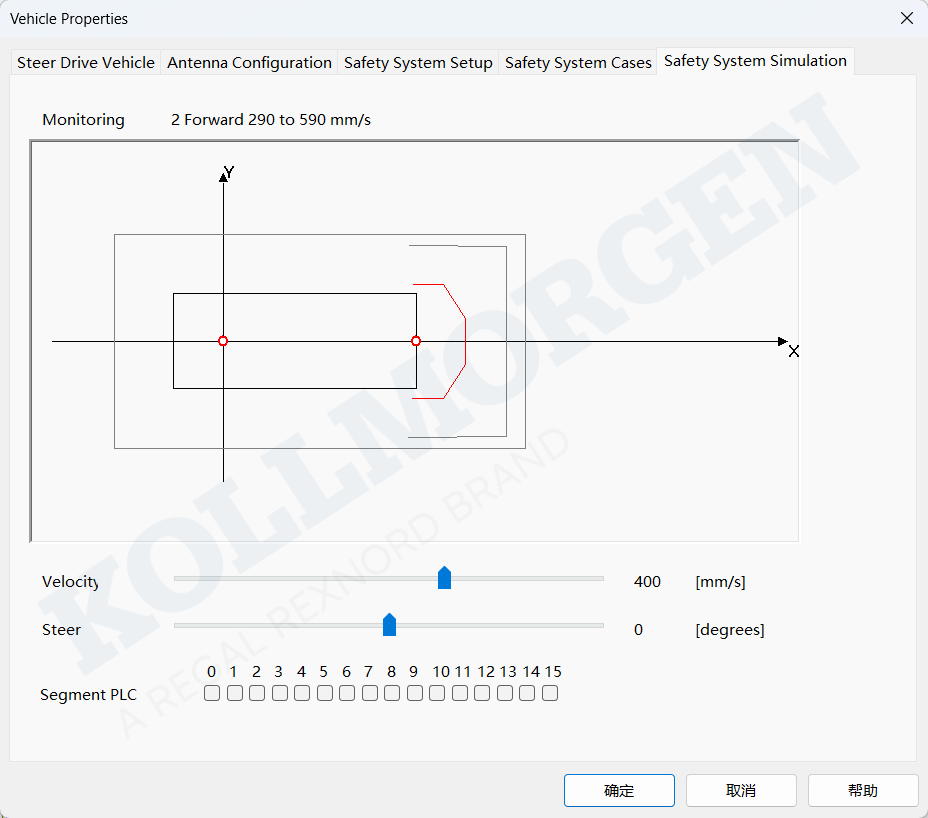
3 避障区域切换效果如下图:
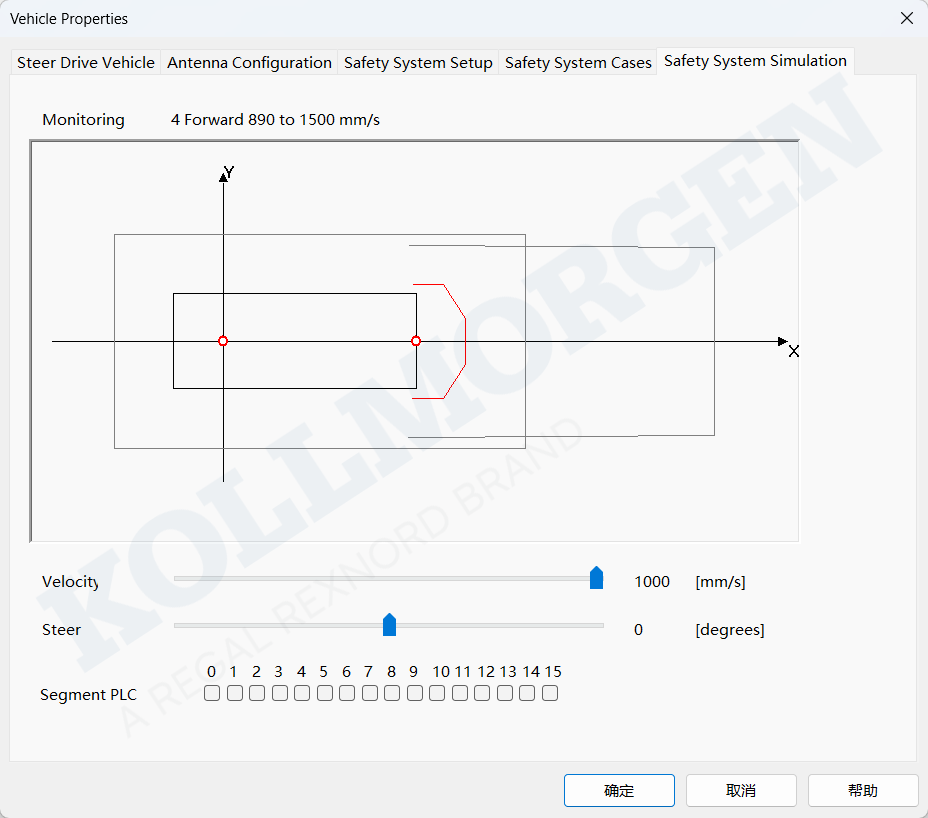
如果直线的线段的属性Speed设置为100%,区域切换如下图:
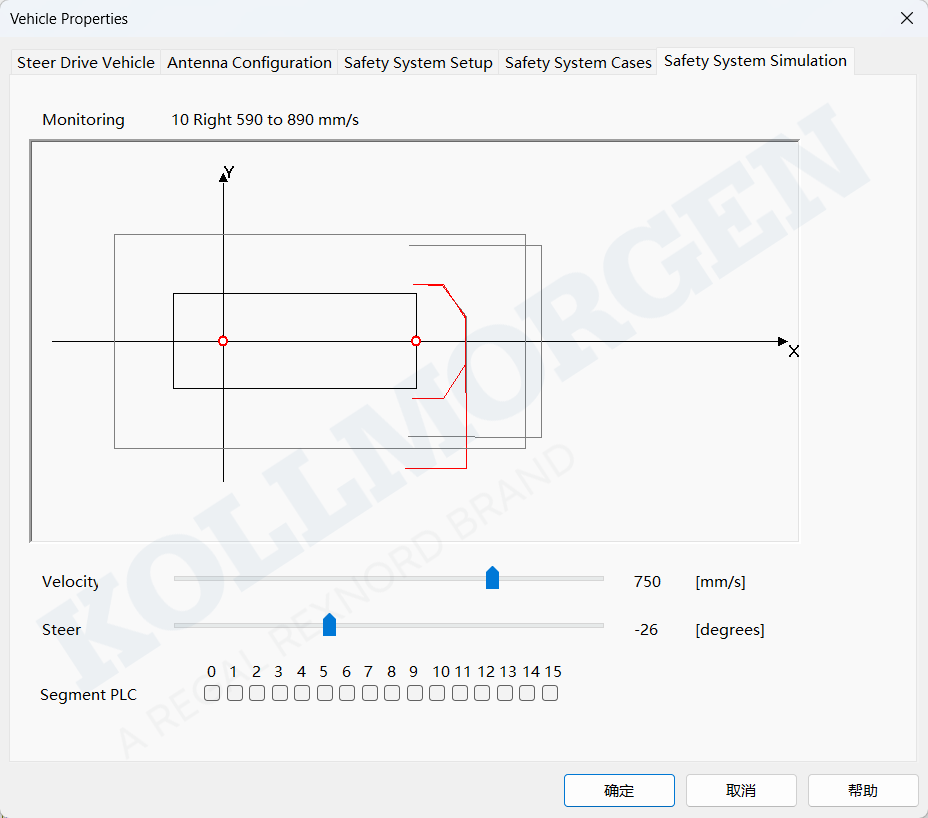
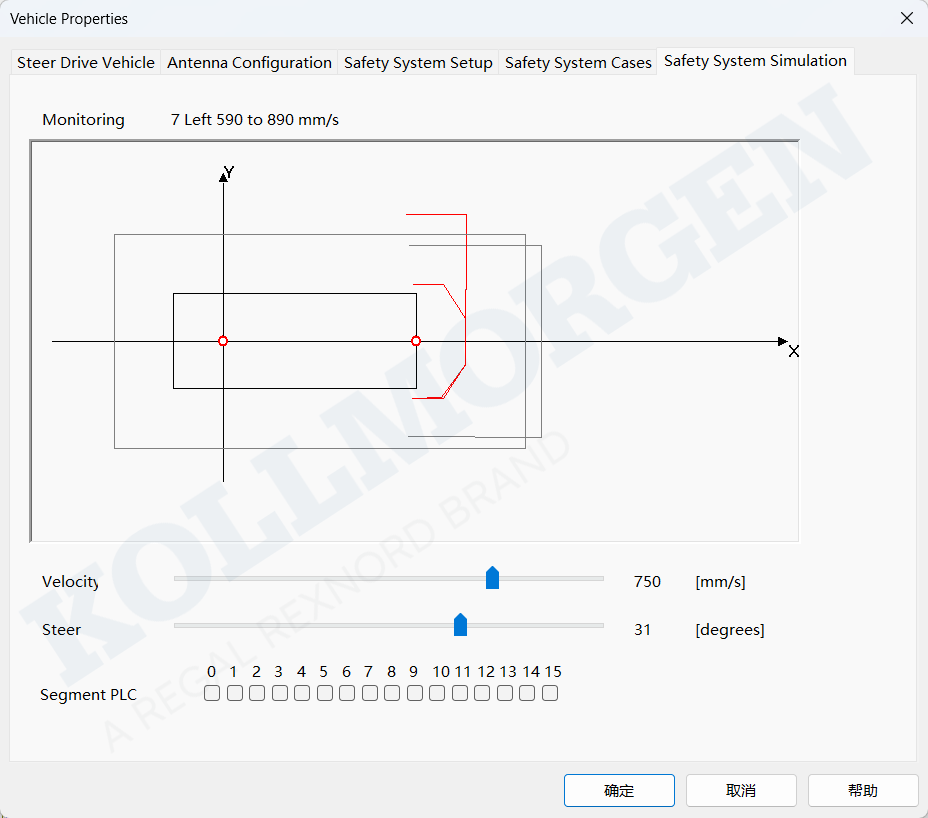
转向角度是根据Layout曲线中计算的车轮转向角度计算的。下图分别是前进时舵轮转角为负角度(右转)和正角度(左转)的区域切换情况。
也可以只使用Segment PLC bits来切换地图,3个bit位可以切换8张地图。
但是无论使用什么方式都要与激光避障实际切图一致才行。
在Safe System Simulation界面可以模拟激光避障切图的效果。
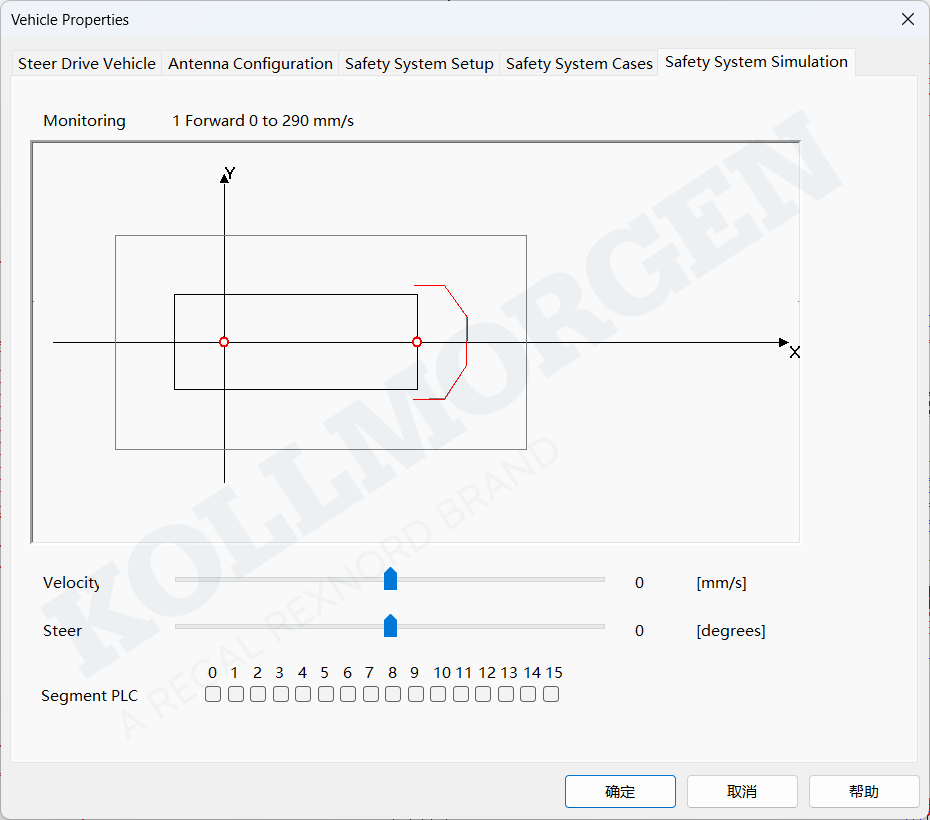
4 当一切都设置正确后,我们在使用线段的Show Sweep就可以看见我们配置的激光避障区域在不同线段扫过的区域范围了。
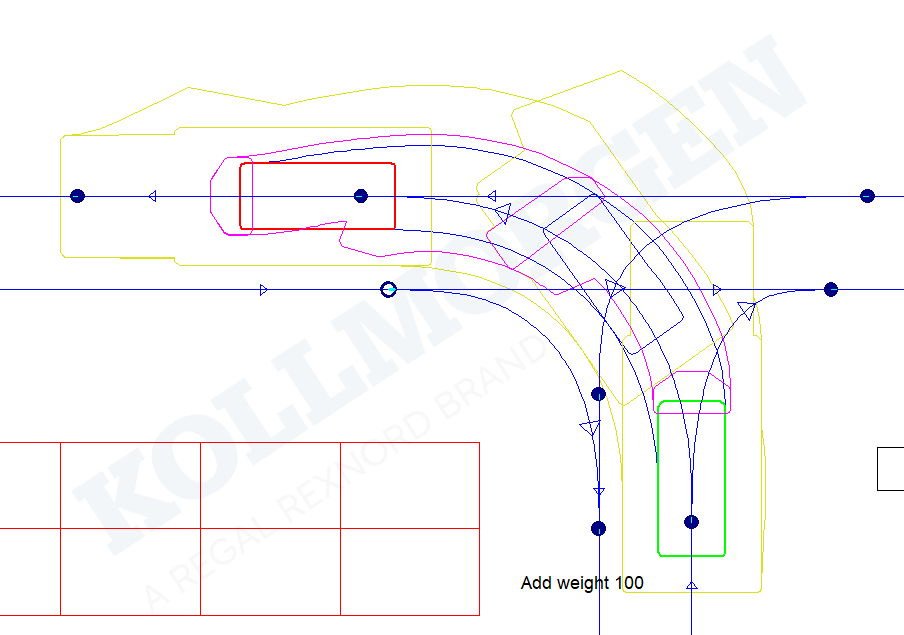
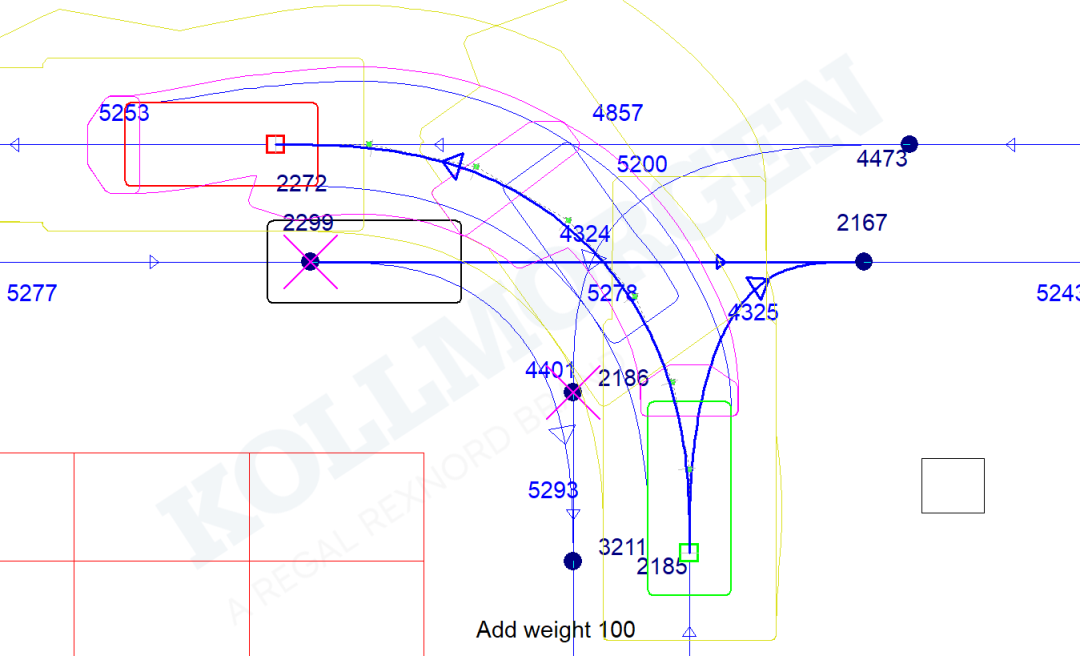
我们再使用线段的Show Blocking时就会发现,如果没有配置激光避障区域,2299点是不会被锁定的,因为可以看出车体扫描的痕迹与停在2299点的车体并不干涉。
如果配了激光避障的停止区域,停在2299点的车体被停止区域扫过也会导致该点被锁定。这样就避免了因避障而导致的死锁问题。
特别注明,此功能仅为auto blocking,而非实际的触发避障功能。
希望大家再做项目时能正确配置避障区域,以减少在项目售后服务的成本,减少AGV运行过程中的人工干预的次数,提高最终用户的使用体验。
Kollmorgen AGV在过去的50多年里,通过NDC平台为自动导引车(AGV)和移动机器人提供了车辆自动化解决方案。通过OEM和系统集成商合作伙伴的生态体系,在全球范围内为各种应用部署了数万辆先进的自动引导车辆。
科尔摩根AGV的解决方案由:系统、车辆、软件工具和服务组成。其中NDC平台不仅支持目前市面上多种主流导航方式,如激光导航,自然导航,二维码导航等,还支持他们的组合导航方式。同时,NDC平台包括用于管理车队和有效引导车辆的软件,以及用于导航和控制的硬件。后期,科尔摩根AGV 定期为合作伙伴提供技术支持,培训,咨询等服务。
使用Kollmorgen NDC8,合作伙伴几乎可以实现不同类型的车辆或移动机器人的自动化,并将其集成到全球任何行业的任何类型的应用场景中。为终端用户降低从前期项目实施到后期系统运维各方的实际成本。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号