每一阶段都需要根据市场情况不断变化去不断更新和完善产品的新内容,快速发展的时代,无疑将淘汰掉一大批企业。
恰佩克奖会场,江西丹巴赫机器人产品总监杨建萍先生,从AGV导航技术、AGV导航技术应用、AGV导航技术的发展三个方面,阐述了智慧工厂主题,他提到,要讲导航技术,就得了解AGV的历史,了解历史才能更好展望未来。
江西丹巴赫机器人股份有限公司(DBH)是专业的机器人制造商、整厂规划信息化提供商、智能仓储系统集成商和智能工厂系统集成商,提供自主研发的智能制造集成行业方案平台、智能工厂系统、智能物流系统、智能制造实验室系统和工业物联网平台等产品。

从历史上来说,有人将1913年的时候福特汽车公司先用到AGV技术,认为是AGV的开端。但他指出,实际上真正的应用应该是在1950年的时候,也是美国人用的一台拖拉机,把拖拉机改造成AGV。而真正由日本人在80年代的时候,开始引进来,我们中国人看到之后也引用过来,应该是1989年的时候。
中国AGV的发展,从1989年的时候开始引进,1990年的时候开始探索,真正起步是在1991到2000年阶段,从2000年以后慢慢AGV技术发展起来,到真正爆发应该是2012年,也是因为近年来网络技术和计算机技术的发展,所以AGV技术也呈蓬勃发展趋势。
他指出,AGV导航技术是AGV一个演进,没有导航技术,AGV寸步难行,在早期AGV技术是用电磁发射,用了有几十年的技术,后面慢慢有磁条技术,再到现在有惯性、地理、激光、视觉、无线等技术。电磁制导是在地面挖了一个坑,把一段电线埋下去,在电线上产生一些信号(正弦波),在车上有一个设备捕捉信号引导车的行走,这是早期的技术。
“这个技术到现在已经不合适了,毕竟要挖坑,想改变精度特别的麻烦。磁条制导,地面上铺好以后,必要的时候还可以改变路径。二维码制导,在地面上贴很多条码,而激光制导,是通过在AGV车顶上安装一个激光雷达,激光制导分为有反光板和没有反光板的,一般用于室内。”杨建萍这样说道。
因此AGV的应用,应该是全面的,根据历史和市场,不断进行创新性发展,提供整体的创新性方案,才能不断服务市场和客户。时代在变化,企业也需要根据市场,在产品上不断研发和生产,才能够顺应时代浪潮,把握前沿技术和市场。
村综合研究所项目经理戴荣荣也曾在近日说过,验证了杨建萍先生提出的不断更新产品的重要性。从1967年日本从美国引进第一台机器人算起,日本的机器人技术也已大致经历了五个阶段,才逐渐形成如今的完善体系。
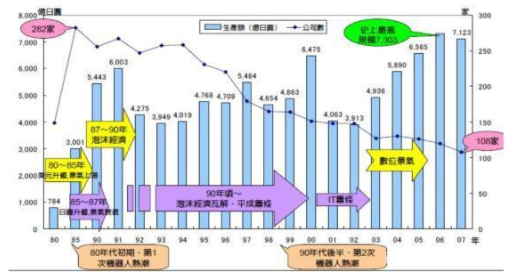
第一阶段——20世纪80年代初。日本研制出弧焊机器人,并制定出机器人行业的安全标准。
第二阶段——20世纪80年代中期。日本针对市场需求,在机器人的控制系统进行了大量的演算开发工作,通过人机对话方式强化了弧焊功能的标准化。
第三阶段——20世纪80年代末。以传感器的应用需求衍生为标志,日本机器人产业强化了控制系统与各类机器人之间的适用性。
第四阶段——20世纪90年代中期。通过广泛的市场模块化需求,针对控制系统的不断改进,日本将机器人系统中植入Robot语言及配置菜单强化对话功能。
第五阶段——20世纪90年代末。此时,日本机器人产业开始强调机器人的相互协调、独立作业功能,并实现通过多轴控制提升工业机器人作业的复杂度及高效性。
市场体系逐渐在技术更新中扩展开来,无疑使得日本企业在全球市场中占据了非常可观的市场地位。中国与日本起步时间相聚不远,能够贴合市场不断推陈出新,无疑会使得企业更具市场前景。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号