随着具身智能技术持续迭代,人形机器人的场景认知、指令理解与任务规划能力稳步提升,逐步具备在真实工业场景落地应用的基础能力。但在动态多变的产线实操环境中,行业通用的传统具身方案仍存在明显短板:多数模型只能基于实时场景完成静态决策与短程任务拆解,缺少对物理世界的场景推演与未来状态预判能力,难以适配真实工业场景实时变化的长程任务作业需求,导致实现决策执行与迭代优化的全链路无法闭环。

优必选立足工业场景真实作业需求与具身智能技术演进方向,基于自研具身智能大模型Thinker,重磅推出全新具身智能世界模型Thinker-WM,打造物理AI基座,实现具身大脑架构与核心能力的全方位升级。凭借在空间泛化、长程任务和综合性能上的优势,Thinker-WM在权威具身智能评测基准 Libero 中登顶榜首。同时参与榜单排名的还有英伟达、Physical Intelligence、小米等知名公司的模型。
依托优必选在行业积累的数据及对模型架构的针对性优化,Thinker-WM构建了Diffusion Transformer统一多模态空间架构。模型在 Flow Matching 迭代演化过程中,实现视频表征与机器人动作空间的协同优化;在对未来场景进行智能想象推演的同时,渐进式打磨动作生成的合理性与连贯性,使其在复杂长程任务规划与执行中具备显著优势。
在全国多地人形机器人数据采集中心网络的强大数据基建支撑下,优必选持续积累更多工业分拣、物料搬运、精细操作、双臂协同等场景的高质量真实交互数据,为世界模型搭建扎实的物理世界认知基底。

所有真实数据均经过精细化清洗、多模态对齐与多层级质量筛选,留存高价值的场景交互、动作轨迹、环境动态变化样本。这些数据有效地帮助世界模型深度学习真实物理规则、物体交互逻辑与工业场景动态特征,精准掌握现实世界的时空演变规律,从根源上避免虚拟生成的数据脱离实际作业场景的问题,为后续智能数据的生成筑牢坚实根基。
01
登顶Libero
攻克长程任务最难壁垒
Thinker-WM 凭借全新的多模态融合架构与自主智能进化能力,助力优必选在权威具身智能评测基准 Libero 中斩获榜首。Libero 仿真环境重点评估机器人终身知识迁移能力,核心考核跨场景泛化、物体泛化、长程任务执行三大关键能力。
目前业内多数模型在空间泛化与物体泛化任务上已逼近满分,但长程任务执行始终是行业长期难以攻克的技术壁垒。而 Thinker-WM 依托具身智能世界模型强大的场景推演与动态环境预判能力,有效破解了长程任务中的环境状态时序变化、执行误差累积等核心难题,取得当前长程任务执行最优性能。同时我们也清晰看到,模型在空间泛化与物体泛化维度仍有性能提升潜力,后续将通过高质量场景数据迭代、模型底层架构持续优化,进一步补齐能力短板、实现综合性能再跃升。
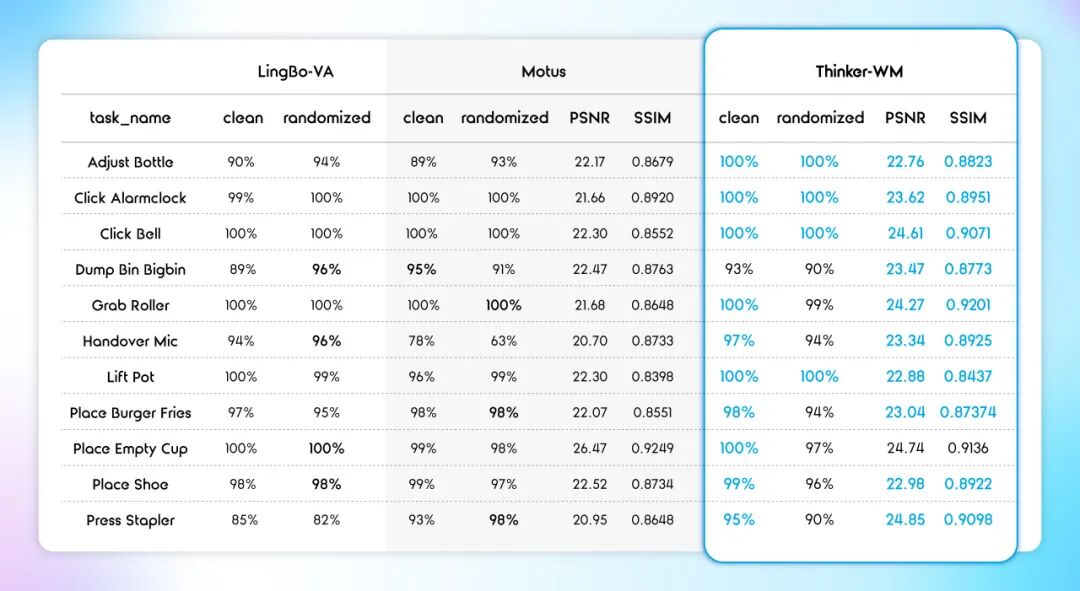
为进一步验证Thinker-WM模型在更加真实的复杂场景下的动作生成精度与未来预测能力,针对日常家居与办公两大典型场景,我们在另一个权威B enchmark——Robotwin中选取了六大类精细化基础操作任务构建评测集,对Thinker-WM的动作执行精度、轨迹稳定性及生成内容的视觉保真度(PSNR, SSIM)进行同步量化评估与多维分析,结果展现出Thinker-WM在更加复杂场景下的依然具有高精度的操作与视频生成能力。
Thinker-WM Robotwin上的视频生成
02
世界模型驱动智能数据飞轮
打造虚实协同的全新训练范式
当前行业普遍存在真实机器人交互数据采集成本高、危险场景采样难、长尾样本数量稀缺、动态复杂任务数据不足等问题,单纯依靠真机采集的传统训练方式,已经无法满足机器人动态预判、精细操控与复杂场景适配的迭代需求。
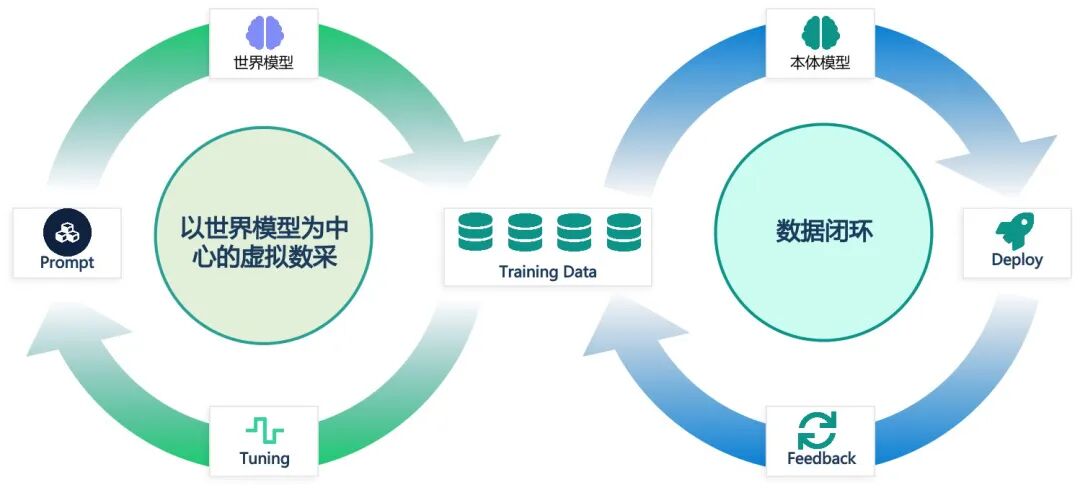
优必选依托全新世界模型架构,重构具身数据的生产与训练逻辑,搭建专属新一代具身模型的AI数据飞轮体系,打破真实数据采集的物理限制,实现数据与模型的双向协同进化。
真实数据打底
少量数据撬动超强泛化性能
少量高质量的真机数据能够精准锚定真实世界的物理交互规则与作业约束,为模型提供不可替代的“地基”。

例如,单条操作数据就可以生成十条以上相同场景不同轨迹的高保真虚拟数据,极大放大有限真实样本的利用效率。这套范式摆脱了行业对超大批量真实标注数据集的依赖,最终实现更低训练成本、更强动态预判、更稳精细操控、更广场景泛化的工程落地优势。
虚拟数据扩容
虚实融合补齐数据短板
区别于传统模型完全依赖真实数据训练的局限性,新一代模型可以依托自主习得的物理世界规律,释放强大的场景想象与智能数据生成能力。基于少量高质量真实基准数据,世界模型能够智能推演生成海量高保真、多样化、高难度的虚拟训练数据,补齐真机难以采集的极限工况、动态干扰、长尾场景、多步骤复杂操作等稀缺样本。同时支持场景环境、光照视角、物体姿态、作业轨迹的自适应泛化生成,有效弥补真实数据集的场景短板,低成本训练数据量级与多样性的双重提升。
双向进化闭环
VLA与世界模型的双向进化
升级后的具身智能数据采集链路包含了真实数据校准、世界模型生成、高质量数据回流、VLA策略优化,形成更加稳健端到端数据闭环飞轮。世界模型产出的海量高保真虚拟数据,可持续为下游VLA模型提供训练支撑,有效强化VLA的精细动作控制、动态场景响应、复杂任务闭环执行能力,补足传统VLA模型训练样本单一、动态适配能力弱、小场景泛化效果差的短板。同时VLA在真实场景作业中产生的全新交互数据、失败案例与实操反馈,会反向回流迭代世界模型,持续优化模型的物理推演精度与场景生成质量,让虚拟数据更加贴合真实工业作业逻辑。

03
数据飞轮驱动模型进化
加速通用具身智能落地
优必选Thinker-WM通过真实数据打底、虚拟数据扩容、双向进化闭环的模式,模型既可精准掌握真实物理规则,又能依托海量泛化样本提升复杂场景适配能力,实现从被动数据投喂到主动生成数据、自主学习技能、持续优化能力的跨越式升级。这套自驱式数据迭代机制,使模型在持续场景交互与数据循环中补齐能力短板、拓展技能边界。
坚持技术开源,优必选近期将在具身智能开发者社区Thinker-Cosmos上开源Thinker-WM,携手全球开发者共建具身智能数据生态,持续推进模型迭代革新,加速人形机器人在千行百业的规模化落地与应用普及。
深圳市优必选科技股份有限公司是全球顶尖的人工智能和人形机器人研发、制造和销售为一体的高科技创新企业。UBTECH是一家成立于2012年的全球领先的AI和类人机器人技术公司。它源自于2008年在数字伺服器(使类人机器人移动的核心部分)方面首次取得的行业领先突破,因此UBTECH的全球研究,设计,开发,具备制造,销售和营销功能,可以成功通过JITECH机器人在家庭中以及通过UBTECH Education在教室中成功推出完整的世界一流的机器人产品组合,包括消费类人机器人,企业服务机器人和STEM技能构建机器人。
UBTECH文化,在UBTECH Robotics,我们将智能机器人带入每个家庭和企业,从而改善了我们的生活,工作和娱乐方式。我们是一家充满活力,多元化,快速发展的公司,通过深思熟虑,相互尊重的协作,重视具有全球影响力的大创意。从最先进的企业部署机器人到启发未来工程师的JIMU机器人,UBTECH致力于通过将机器人融入每个人的日常生活中来改变世界,从而提供更智能的生活方式。
UBTECH教育,UBTECH Education是UBTECH的一个部门,UBTECH是面向消费者,企业和行业的智能型人形机器人的全球领导者,我们热衷于为所有学习者做好工作的未来准备。我们的解决方案为学生蓬勃发展奠定了坚实的基础:结合21世纪技能和计算素养的发展的高质量STEM教育。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号