
NDC系统攻略 / KOLLMORGEN
随着自动化物流的快速发展,AGV/AMR在提高生产效率和优化物流流程方面发挥着越来越重要的作用。而作为其核心控制中枢的NDC系统,不仅决定着AGV/AMR性能的上限,也是保障它们可靠、稳定、高效运行的关键。
然而,在日常的使用过程中,我们可能会遇到各种各样的问题。有的能够自行解决,有的则会令人手足无措。在今天的推文中,我们将继续聚焦于大家所关心的问题,深入剖析其根源,并探讨应对之策。
我们经常会在黑盒中看到非法修改NDC8参数报错“SysEvent 175: Illegal modification of NDC8 parameter. Error 2, offender 1.”,导致其报错的原因是什么?
我们先来看看报错的代码中后面两个参数分别表示的含义:
参数1:如果是Error 1,表示写入了只读值;如果是Error 2,表示赋值范围已经超过了限定值。
参数2:如果是offender 1,表示问题原因是PLC程序;如果是offender 2,表示问题原因是CAN设备;如果是offender 3,表示问题原因是后台程序。
在这个问题中,“Error 2, offender 1”表示的就是在PLC程序中的赋值范围已经超过了限定值。我们可以通过如下两个黑盒示例来分析原因:
黑盒1 观察路径(二级标题)
打开VDT-Black box-Program logs- CAN log:

在CAN log日志中,我们可以看到问题中报错的下面紧跟了PLC赋值变量VehicleNavigator.SetNavMethod为11的值超限了。而如果想要了解SetNavMethod变量的范围,我们可以到VAD-Connection view-CVC700-VehicleNavigator-SetNavMethod-properties路径下查询,查询结果如图中所示,这个值的最大值为8,印证了前面所说的PLC程序中赋值为11超过限定值的结论。

黑盒2 观察路径
打开VDT-Black box-Events and Trace- System log:

在System log日志中,我们可以看到问题中报错的下面紧跟了PLC赋值变量LocalOrder.DestPoint为0的值超限了。同样想要了解DestPoint变量的范围,我们可以到VAD-Connection view-CVC700-LocalOrder-DestPoint-properties路径下查询,查询结果如图中所示,这个值允许的最小值是1,印证了前面所说的PLC程序中赋值为0超过限定值的结论。

在黑盒的CAN日志中,看到CAN总线的某个节点上报3120错误码,通常是什么原因引起的?
01、我们可以通过查询手册中的“Product Description ACS and ACD”找到故障根源。
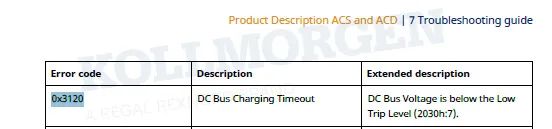
0x3120故障:表示直流母线充电超时或者直流母线电压过低。
02、我们可以通过查看错误日志的路径“VDT-Black box-program logs- CAN log”定位报错内容。

从报错内容中,经过分析得知:这是节点5上的设备报出来的错误。可以通过以下路径查看具体是什么设备:从VDT-Black box-Version中查看到,这是节点5上的ACS驱动器报出来的错误。
以ACS驱动器为例
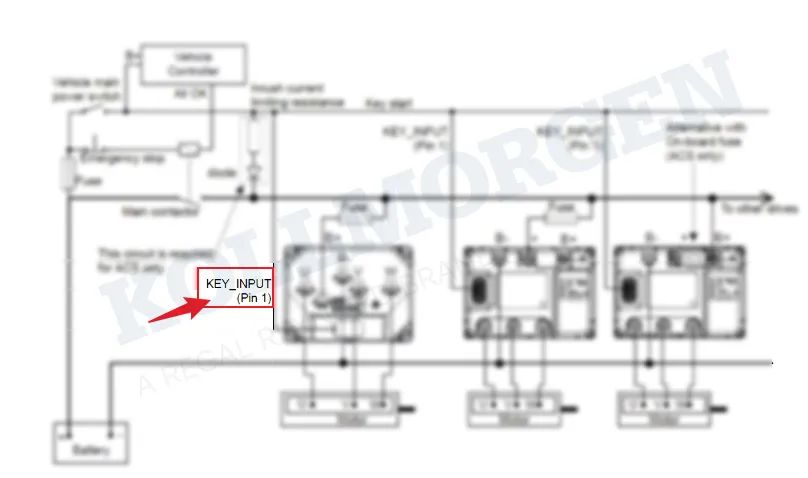
1、一般报3120错误可以先考虑检查一下ACS的Pin 1电气上连接是否正常。
2、如果Pin 1连接正常,可以再检查一下ACS的直流母线电压值跟其他正常运行的车辆是否有区别。查看路径:VDT -CAN-ACS5-Dcbusvoltage。
3、 ACS一般要求在电路中设计二极管和浪涌电流限制电阻,防止反极性和做浪涌电流保护(如下图所示)。详细可参考手册Product Description ACS and ACD。
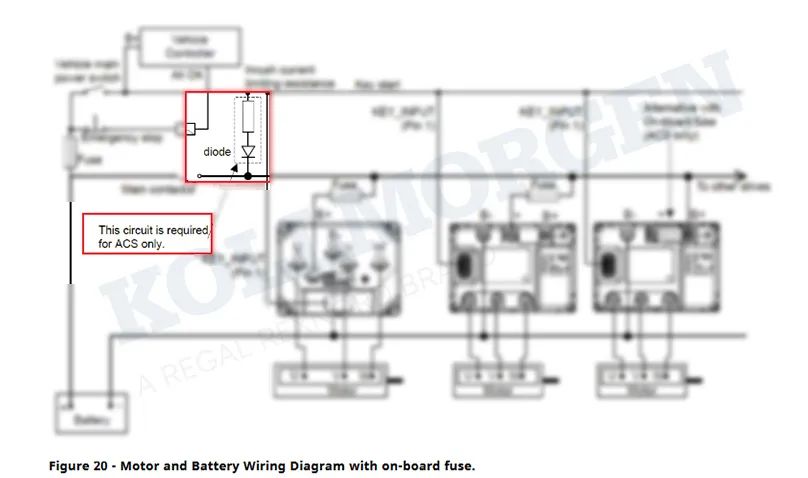
浪涌电流限制电阻图
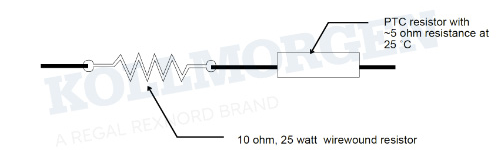
4、除了检查以上步骤,还可以对比问题车辆上的ACS和该车上的其他设备的供电情况是不是都有受到同样的异常供电电压影响,这种情况下,可以检查一下是否由主电源供电异常引起的问题。
左右滑动查看更多
如何配置新版本CVC700 SW 1.4.0固件,需要提前做好哪些准备工作?
01、在“partner-portal”下载好固件版本,并安装到电脑中。

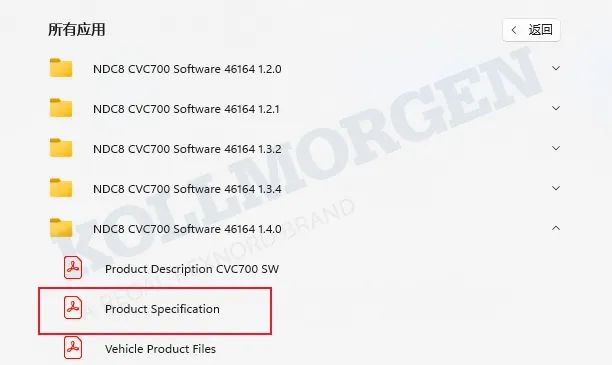
02、在“所有应用中-NDC8 CVC700 Software 46164 1.4.0-Product Specification”找到固件1.4.0产品资料介绍。
03、查看产品资料第10章,从老版本升级到新版本,并且根据其他相关软件最低版本要求进行软件版本更新。
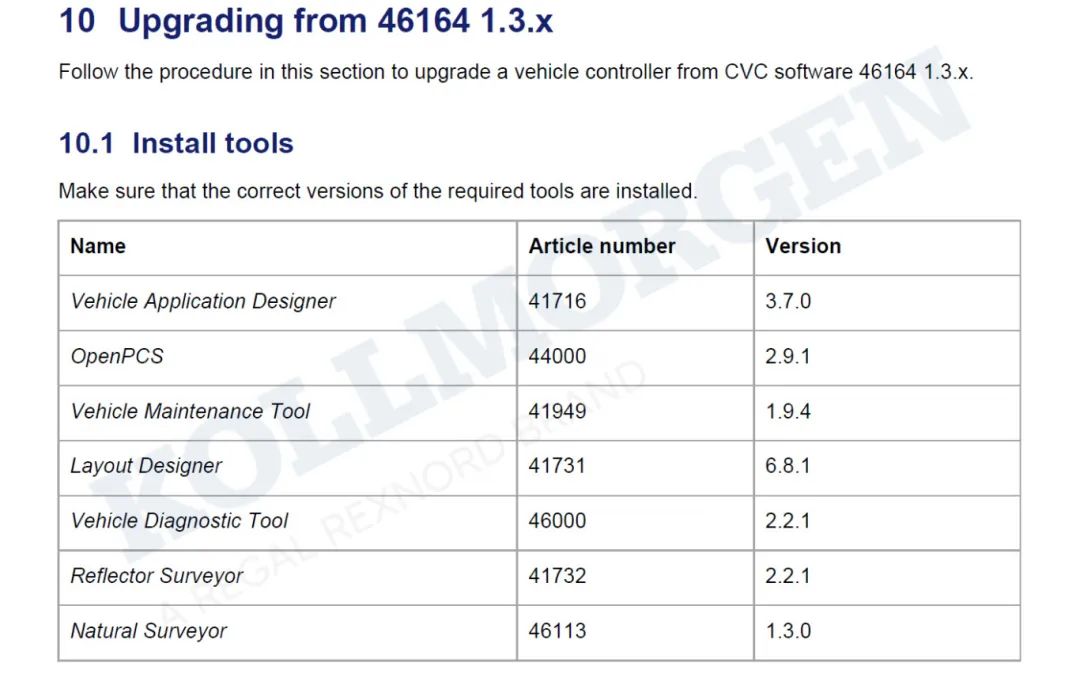
这里我们可以看到:如果从固件版本1.3.X升级到固件1.4.0,需要用到最新的VAD 3.7.0和OpenPCS 2.9.1,Vehicle Diagnostic Tool和Layout Designer软件也至少需要分别更新到2.2.1版本和6.8.1版本。
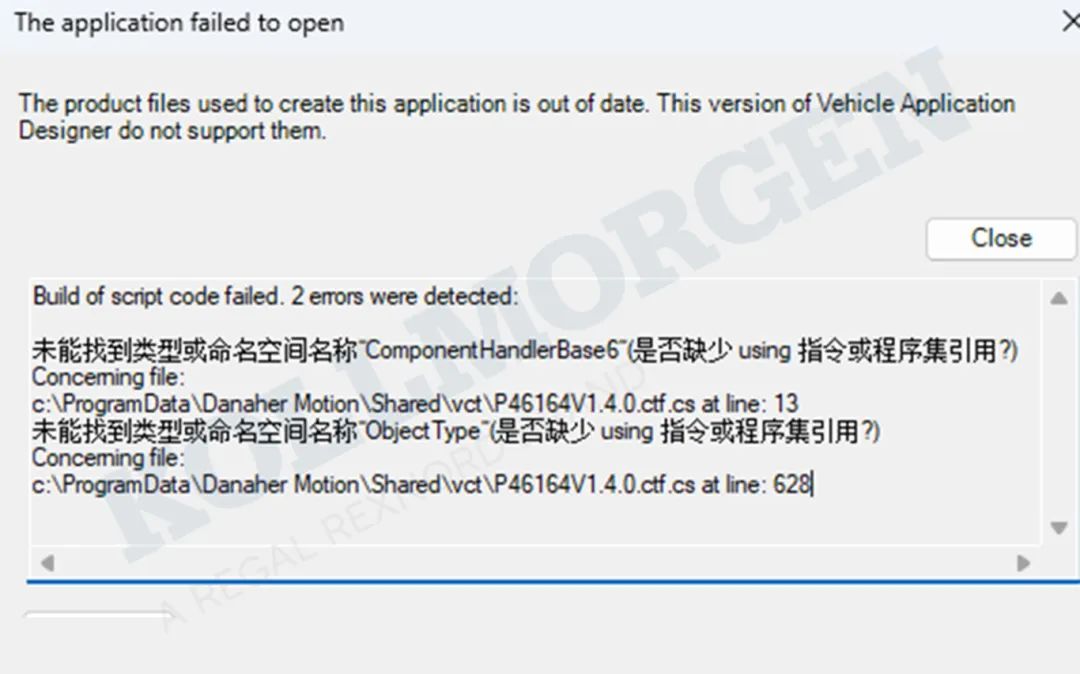
比如我们常见的报错,在用老版的VAD版本运行的时候就会报版本不支持的错误,如图:
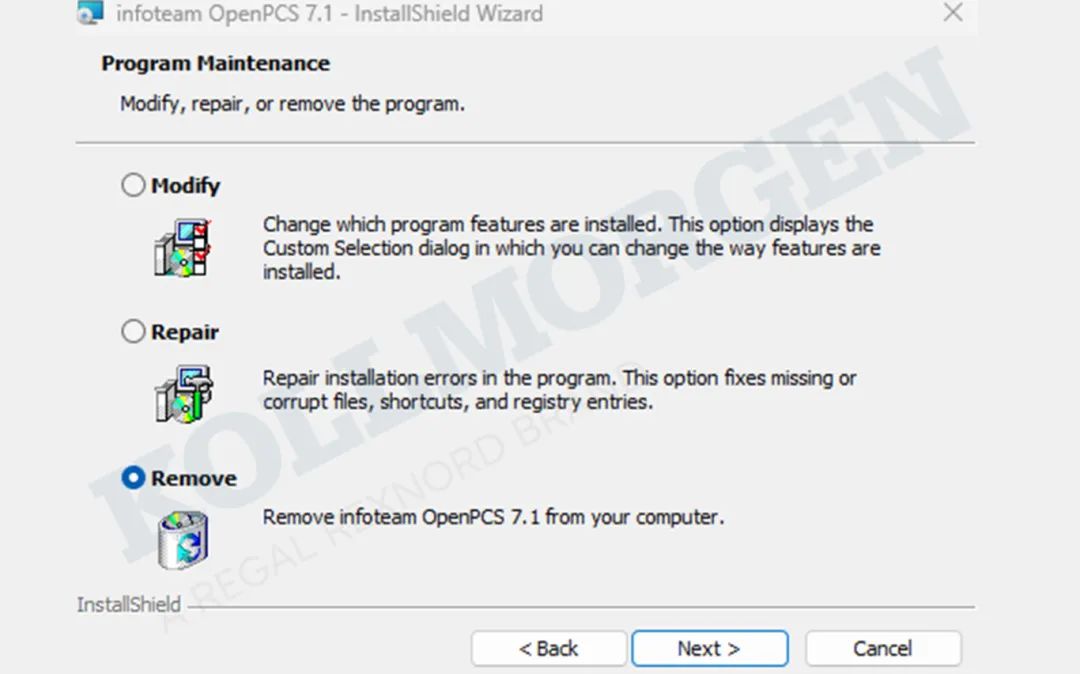
这里需要注意的是,安装OpenPCS 2.9.1的时候需要先remove掉老版的OpenPCS,重启电脑以后再重新安装新的OpenPCS。
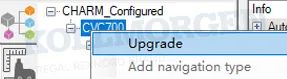
04、软件版本都安装更新好以后,便可以进入到“VAD-Connection view-CVC700-Upgrade”。
05、在VAD端更新完程序固件后,会出现需要更改Hardware Module的如下提示:
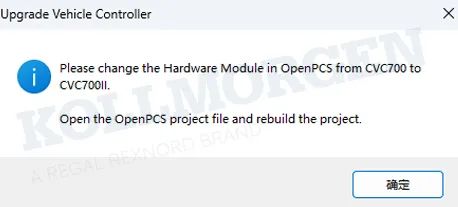
我们可以通过如下路径到OpenPCS中进行Hardware Module的修改:OpenPCS-PLC-Resource properties。
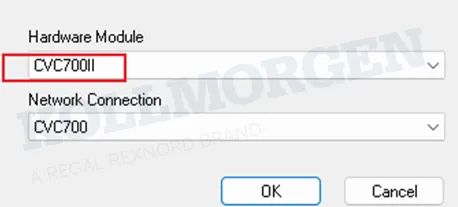
当这些步骤都按部就班完成好以后,我们就可以正常部署使用我们的新版固件1.4.0了。
今天的答疑解惑就到这里
希望本期的内容
能够成为您排除故障,进阶技能的有力指南
为您的工作带来便捷和高效
如果您还存有新的疑问
欢迎随时在评论区留言或私信我们
科尔摩根愿与求知欲满满的你
共同成长,共同进步!

答疑解惑丨常见问题汇总,这份NDC系统攻略请收好(一)
关于科尔摩根NDC解决方案
科尔摩根通过NDC平台为自动导引车(AGV)和移动机器人(AMR)提供了车辆自动化解决方案,通过OEM和系统集成商合作伙伴的生态体系,在全球范围内为各种应用部署了数万辆先进的自动引导车辆以及移动机器人。
科尔摩根的NDC解决方案由:系统软件、车辆软件和车辆硬件、设计和扫描工具和服务组成。NDC平台不仅支持目前市面上多种主流导航方式,如激光导航,自然导航,二维码导航等,还支持他们的组合导航方式。同时,NDC平台包括用于管理车队和有效引导车辆的软件,以及用于导航和控制的硬件。此外,科尔摩根定期为NDC合作伙伴提供技术支持,培训,咨询等服务。
Kollmorgen AGV在过去的50多年里,通过NDC平台为自动导引车(AGV)和移动机器人提供了车辆自动化解决方案。通过OEM和系统集成商合作伙伴的生态体系,在全球范围内为各种应用部署了数万辆先进的自动引导车辆。
科尔摩根AGV的解决方案由:系统、车辆、软件工具和服务组成。其中NDC平台不仅支持目前市面上多种主流导航方式,如激光导航,自然导航,二维码导航等,还支持他们的组合导航方式。同时,NDC平台包括用于管理车队和有效引导车辆的软件,以及用于导航和控制的硬件。后期,科尔摩根AGV 定期为合作伙伴提供技术支持,培训,咨询等服务。
使用Kollmorgen NDC8,合作伙伴几乎可以实现不同类型的车辆或移动机器人的自动化,并将其集成到全球任何行业的任何类型的应用场景中。为终端用户降低从前期项目实施到后期系统运维各方的实际成本。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号