
随着AGV技术的不断发展和完善,智能、柔性、安全的AGV无人搬运方式提升了工厂物流整体的自动化水平。以AGV小车来替代人工完成物料的搬运、装卸、储存和运输工作,已经让越来越多的行业领域开始从中受益,不仅可以减少人为失误所带来的一系列风险,降低运营成本,还在于明显改善工作环境,实现了更高效、更精准和更安全的物料运输和管理任务的执行。
科尔摩根AGV定制的CVC700车辆控制器与LS2000激光传感器相当于AGV小车的眼睛和大脑,它们确保了车辆迅速和精准的运行。CVC700是一款AGV专用控制器,可以支持除麦克纳姆轮外的其他几乎所有轮系结构,包括单舵轮、双舵轮以及差速轮,这使得其能够兼顾更多的应用场景。
而如果想要让AGV达到理想的重复定位精度,比如在站点工位上,要求对接精度在5mm以内,那么AGV的物理参数,如轮系的机械、电气参数及激光传感器LS2000的物理位置参数等,都要设置的尽可能准确。
鉴于车辆调试的难度较大,且实现过程中涉及到多个环节和因素的综合考虑,虽然科尔摩根AGV提供了自动调车的PPA(physical parameter adjustment)调试向导,可以方便您用更短的时间自动优化参数,但在某些场景下,仍然需要手动调车,以达到更高的统一精度。
1、手动调试的前提
在手动进行车辆调试前,应具备以下几个前提条件:
1舵轮的电气响应,即转向和行走的跟随性良好;
2选择一个地面平整的场地;
3下载Layout,创建空间坐标系。
一切准备好后,方可进行后面的调试步骤

2、STEP1 车辆走直

首先,将车辆置于手动模式,通过Manual.PlcSelect,强制SetAngle=0。起始位置记作标记1;行驶车辆前进5m后停下,在相同位置,记作标记2;再驶进5m停下,依旧在相同位置,记作标记3。
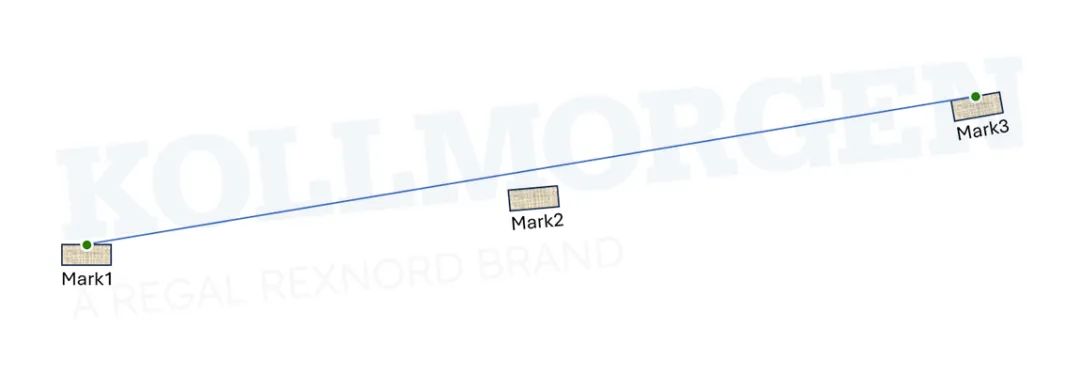
然后用激光水平仪,使光线连接标记1和标记3。
假设标记2出现在图示连线的右侧(Golbal_Y-方向),就意味着车向左偏,即SetAngle=0时,伺服使舵轮到达的实际物理位置并不处于机械零度,而是偏左。
这时,如果您的标定程序为YourServo.TargetPosition= (NDC.SetAngle+SteerOffset)*SteerScale,那么需要将SteerOffset加上一个负值。
反之则亦然,直到标记2与连线的偏差小于50mm。
若是车体的机械、电气设计良好,测试地面平整,偏差可降至10mm以内。这里需要特别注意的是,前进、后退可能要设置不同的SteerOffset,可以在PLC中动态切换。
3、STEP2 调节行走比例尺
同样,先将车辆置于手动模式,通过Manual.PlcSelect,强制SetAngle=0。起始位置记作标记1,行驶车辆前进10m后停下,在相同位置,记作标记2。

然后使用激光测距仪,测量标记1和标记2的实际物理距离,对比NDC记录的行驶距离反馈。
如果您的标定程序为YourServo.TargetVelocity=NDC.SetSpeed* DriveScale,那么可通过修正DriveScale,使反馈距离和实际距离的偏差小于10mm。
* 在接下来的步骤中,需对LS2000的位置坐标进行标定。测试条件应在启用导航的情况下,自动行驶完成。这是因为一个良好的反光板导航环境,具备定位参考的唯一性,以此为前提才可以标定出LS2000的准确坐标。
4、STEP3 标定LS2000.Angle

首先将车辆切换到自动模式,使其停在起点。通过发送指令控制车辆前进至2.5m点,在尽量靠近车体参考点的位置,记作标记1。然后将其行进至5m点。

再从5m点,后退至2.5m点,在相同位置,记作标记2。

观察标记2相对于标记1的方向和距离,如果标记2在Global_Y+方向,那么需要将LS2000.Angle加上一个正值。反之亦然。最后,修正LS2000.Angle,使两个标记的偏差小于5mm。
5、STEP4 标定LS2000.Y

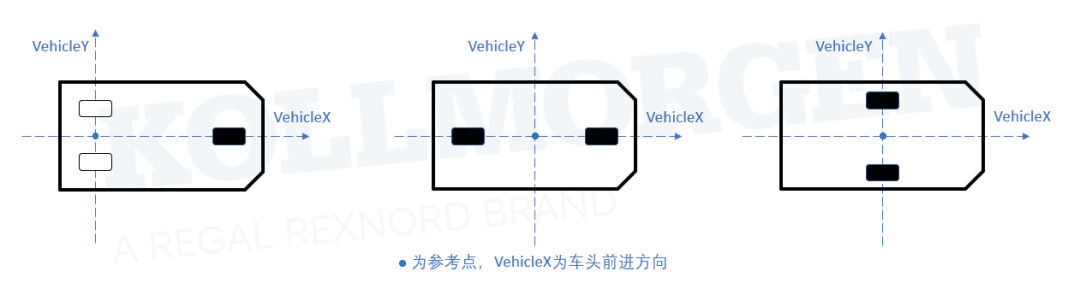
标记位置,要选择相对于车体Vehicle.X轴可以完全对称的地方,比如图中。

自动模式,让车站在起点。发命令让车前进至2.5m点,做标记1。
掉头,再从5m点,前进至2.5m点,在对称位置,做标记2。
观察标记2相对于标记1的方向和距离,如果标记2在Global_Y+方向,那么LS2000.Y加上一个正值。反之亦然。修正LS2000.Y,使两个标记的偏差小于5mm。
6、STEP5 标定StopTolerance

车辆置于自动模式,停在终点10m点。发送指令使其后退至5m点,记作标记1。

然后将车后退回起点,再前进至5m点,在相同位置,记作标记2。

观察标记2相对于标记1的方向和距离,如果标记2在Global_X+方向,那么需要将StopTolerance加上一个正值。反之亦然。最后,修正StopTolerance,使两个标记的偏差小于5mm。
7、STEP6 标定LS2000.X

标记位置,要选择车体Vehicle.Y轴,或者相对于Y轴可以完全对称的地方,比如图中。

自动模式,让车站在起点。发命令让车前进至5m点,做标记1。

掉头,再从10m点,前进至5m点,在对称位置,做标记2。

观察标记2相对于标记1的方向和距离,如果标记2在Global_X+方向,那么LS2000.X加上一个正值。反之亦然。修正LS2000.X,使两个标记的偏差小于5mm。
8、STEP7 验证
对于已经标定好上述物理参数的AGV,其在反光板导航环境下,以300mm/s速度,从起点自动行驶至10m点,x/y/angle累积校准误差均应小于0.005。

达到上述标准的AGV,稳定导航下,其重复定位精度会小于10mm(±5mm)。相对应地,多车的一致性也会得到保证。
Kollmorgen AGV在过去的50多年里,通过NDC平台为自动导引车(AGV)和移动机器人提供了车辆自动化解决方案。通过OEM和系统集成商合作伙伴的生态体系,在全球范围内为各种应用部署了数万辆先进的自动引导车辆。
科尔摩根AGV的解决方案由:系统、车辆、软件工具和服务组成。其中NDC平台不仅支持目前市面上多种主流导航方式,如激光导航,自然导航,二维码导航等,还支持他们的组合导航方式。同时,NDC平台包括用于管理车队和有效引导车辆的软件,以及用于导航和控制的硬件。后期,科尔摩根AGV 定期为合作伙伴提供技术支持,培训,咨询等服务。
使用Kollmorgen NDC8,合作伙伴几乎可以实现不同类型的车辆或移动机器人的自动化,并将其集成到全球任何行业的任何类型的应用场景中。为终端用户降低从前期项目实施到后期系统运维各方的实际成本。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号