什么是单件分离
在物流分拣领域,成堆包裹上包前需要将其进行逐一分离,这使得“单件分离”成为了自动化分拣前需要集成的一个重要步骤。而传统仓库的包裹分离过程大都依靠人工完成,这会消耗大量的劳动力且效率低下,为能提升包裹分离速度和效率,许多公司开始将视觉系统与皮带机相结合,研发出包裹识别与单件分离系统。

基于RGB-D ToF相机的单件分离系统
维感科技在这个领域已有诸多成功案例,合作伙伴通过集成Vzense RGB-D ToF相机,结合目标检测算法,推出了应用于物流分拣领域的包裹识别与单件分离系统。
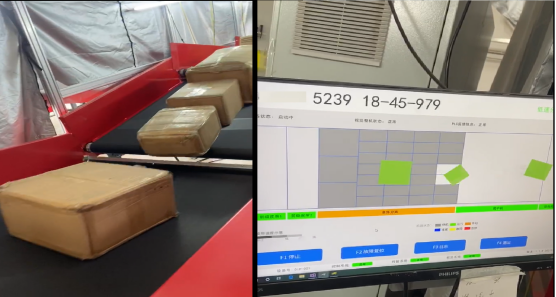
该单件分离系统主要由散射皮带机、分离皮带机以及3D ToF深度相机组成,使得机器视觉与设备传送速度配合,让成堆的包裹在进入各种自动化分拣产线前,能够相互之间拉开距离,有序处理各类型包裹,让原本杂乱无章的包裹堆做到智能“排队”,实现高效、准确的包裹自动分离,为自动化物流领域的下一环节做好准备。

据不完全统计,使用单件分离系统的分离成功率高达98%,工作量可达4000件/小时,约计可替代3-4人工,物流行业的生产效率和效益得到大幅度提高。
维感科技RGB-D ToF相机
可解决的行业痛点:
- 仅使用传统二维彩色相机捕捉包裹信息,由于缺少包裹深度距离信息,会导致识别准确率低,易造成包裹状态的误判;
- 部分3D相机由于帧率低及运动模糊问题,无法应用于快递移动的场景;
- 部分3D相机由于视野角不够大,需要将多台相机拼接取图;
- 3D相机普遍存在价格高的问题,无法在成本要求较高的物流分拣场景中批量推广。
维感科技RGB-D相机优势:
- 帧率高,最高可至30fps;
- 最大视场角可达H102°*V85°;
- 极高性价比,适合批量化应用;
- 同步捕捉二维彩色图像信息与深度距离数据,准确分辨包裹位置与状态;
- 可配合有边缘算力需求的客户进行批量产品定制,进一步提高分拣效率,降低方案成本。
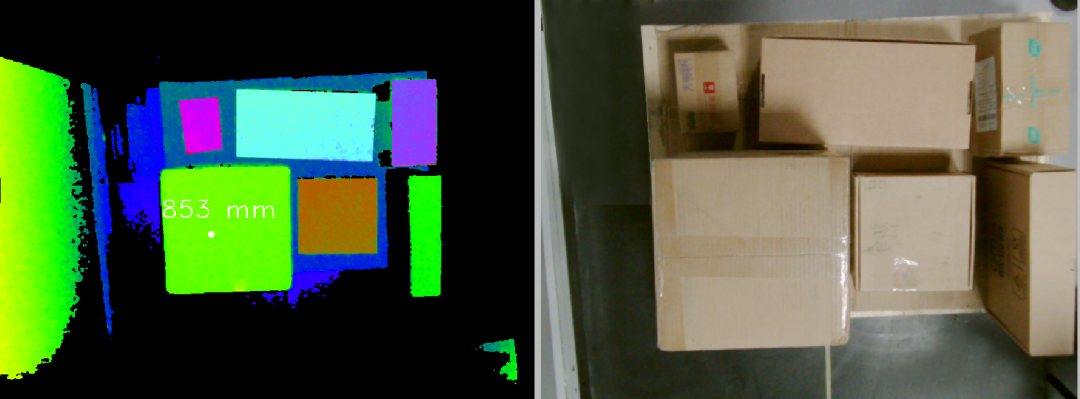
场景展示:
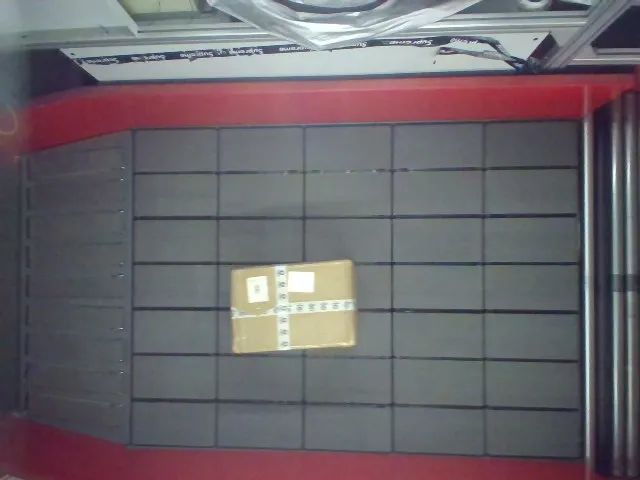
RGB效果
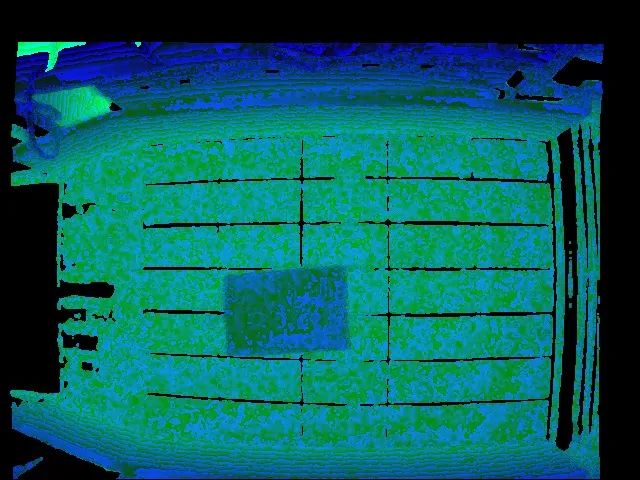
Depth效果
青岛维感科技有限公司自2016年开始从事三维图像,计算机视觉,图像处理,传感器融合,手势和面部识别等研究,近两年来,结合团队自身优势,将ToF(Time-of-Flight)技术的应用与解决方案定制化确定为公司的长期发展方向。针对ToF技术几大核心应用场景,维感科技陆续推出多款标准化工业产品,同时,结合具体应用需求,与客户协同开发了多款定制化的产品和软件。产品核心使用场景包括:
• 客流统计与行为分析
• AGV/AMR避障与栈板识别
• 物流领域单件分离和仓库货位检测
• 工业自动化领域图形辅助等
维感科技致力于成为全球领先的一站式ToF方案提供商,竭诚为客户提供:
| 标准化产品 | RGB-D ToF 模组 | ToF工业整机 |
| -带有200万像素的RGB Sensor, 可用于同时需要RGB信息的场景中 -MicroUSB接口,即插即用,配合Vzense图形化工具,可快速上手使用 | -基于工业应用场景打造的ToF Only模组,具有高分辨率,高精度,高可靠性的特点 -多种角度和接口可按需选择 | |
| 定制化产品 | ToF硬件&系统 | 软件SDK+算法 |
| 根据用户应用场景,针对核心需求,为用户ToF模组硬件及系统定制开发服务。可针对硬件的核心参数及系统软件要求进行深入定制开发 | 针对标准硬件产品提供各系统平台的SDK及图形化工具。SDK平台包括Windows,Linux,Android,ARM Linux,ROS等 |
Starting from 2016 as the name Pico zense, Vzense Technology Corp. is a professional ToF (Time-of-Flight) sensor and solution provider. Benefited from team’s expertise in professional product design, quick delivery and strong engineering support, Vzense has delivered around one hundred thousand ToF products globally and implemented customized solutions for customers from United States, EU, Japan and China.
Vzense’s ToF products have been applied for people counting and can also be integrated to system of AGV/AMR, logistics, and many other use cases.















 粤公网安备 44010602004352号
粤公网安备 44010602004352号