目前,机器人在各大场景下都有落地应用,“大放异彩”。但同时,机器人作为一个技术驱动型产业,想要立足,核心技术是关键,能落地也是关键。

思岚科技,让机器人移动更智能。为了帮助机器人适应多种应用环境,思岚优化了软件算法、强化了建图引擎,让机器人在复杂、大面积的场景下也能轻松应对,稳定发挥,完成定位导航任务。这一切,归功于思岚自研的第三代SLAM算法SLAM3.0。

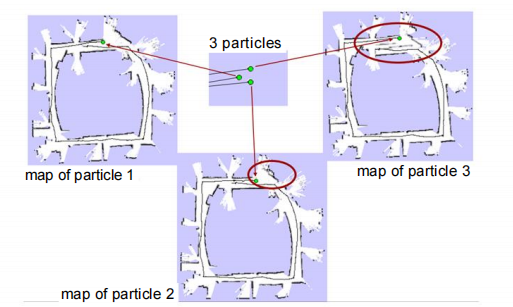
传统的SLAM有着一些令人诟病的弊端,因为通过同时绘制多个不同的可能地图实现对闭环的穷尽,因此原理上不可能对已经画过的地图做修正和调整,从而导致一步错便步步错,每次地图更新必须直接修改,全部推倒重来。
反观SLAM3.0,则针对各类问题进行了大幅优化和修正,极大提升了使用体验。综合而言,其中的7项黑科技值得一提。
1.利用SharpEdgeTM 构建高精度地图
SLAM3.0 采用SharpEdgeTM精细化构图技术构建高精度、厘米级别地图,超高分辨率。同时,构建的地图无需二次优化修饰,直接满足用户预期,拥有百万平米级别的地图构建能力,从而造就了行业“美观、真实”高精度建图的标杆。

2.基于图优化的SLAM方式
基于图优化的SLAM3.0摒弃固定的栅格地图,存储地图构建过程中调整了图结构中每个节点的pose和对应的传感器信息以及所有关键点构建的位姿关系图,利用全部的机器人位姿信息和对应传感器数据生成环境地图。

3.主动式回环闭合纠正
当机器人运动到已经探索过的原环境时,SLAM 3.0可依赖内部的拓扑图进行主动式的闭环检测。当发现了新的闭环信息后,可使用Bundle Adjuestment(BA)等算法对原先的位姿拓扑地图进行修正,从而有效进行闭环后地图的修正,实现更加可靠的环境建图。

4.支持多传感器融合
除激光雷达传感器外, SLAM 3.0 同时支持深度摄像头、超声波、物理碰撞、跌落等各类其他传感器数据,并实时进行融合,实现可靠导航。并且,拥有标准化的扩展传感器协议规范,使用者可自行定义扩展新型传感器,降低对激光雷达性能的依赖。

5.支持多种不同种类的自主移动平台
目前,机器人行业并未存在一个统一的标准,功能、外形上都存在差异。SLAM 3.0的发布,支持多种类型的移动平台,助力打造细分领域的智能机器人,并可针对封闭环境的自动驾驶进行特性专门设计。

6.封闭场景导航算法支持
思岚SLAM3.0相较开源SLAM方案,还支持如:虚拟墙、虚拟轨道、自主充电、电梯调度等功能,让机器人提供更好的自主定位导航服务。

7.实时存储地图数据
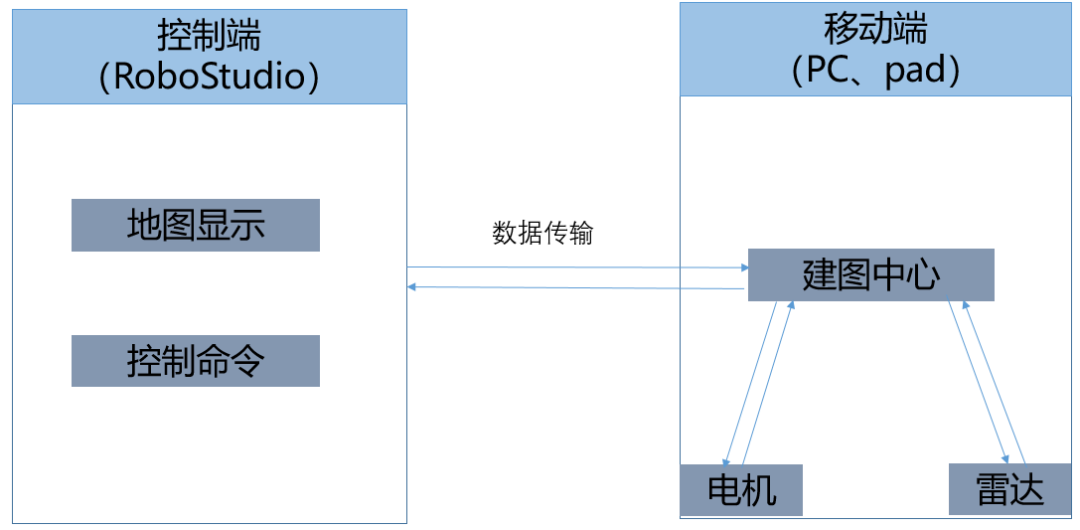
建图优化引擎具有实时存储地图数据的能力。地图数据始终存在于建图中心或者移动端内存里,控制端与建图中心断开连接时地图数据不会丢失,在移动端没有断电的情况下地图数据也不会丢失。
正因为如此多的技术赋能,使SLAM3.0成为了目前行业中最受欢迎的定位导航算法。当前,思岚科技已建立起核心的技术壁垒,并形成了“算法迭代-性能稳定-新品频出”的正循环。

伴随着机器人行业的成长和发展,思岚将继续为机器人的“智脑”叠加更多的Buff,用科技的力量持续助力中国“智造”的机器人走入千家万户。
思岚科技(SLAMTEC)成立于2013年,其核心研发团队在机器人自主定位导航及核心传感器方面拥有丰富的研发和实践经验。通过技术研发和产品迭代不断为机器人市场提供高效可靠的解决方案,思岚科技已成为服务机器人自主定位导航解决方案的领航者。
思岚科技目前拥有:360°扫描测距激光雷达RPLIDAR、模块化自主定位导航系统SLAMWARE及通用型服务机器人平台ZEUS等三条核心产品线。目前业务辐射亚洲、欧洲、北美等全球20多个国家和地区,服务企业用户超过2000家、个人用户累计超过10万。
发展历程















 粤公网安备 44010602004352号
粤公网安备 44010602004352号