定位、导航和运动规划
AGV/AMR的基本要求是让它知道自己在哪里,并沿着规定的路径安全移动。在最简单的导航形式中,AGV只是在无菌环境中跟随磁条或地板上的画线。
在先进的一端,AMR在地图上的各点之间能完全的自由移动,同时避开障碍物并与人类互动。
在繁忙的仓库内,周围有人类、杂物、车辆和机器,机器人的定位、导航和运动规划非常复杂。定位和导航技术是发展最迅速(有些人可能会说是被炒作)的AMR技术之一。
创新既发生在传感器方面(激光雷达、照相机、UWB、5G......),也发生在软件和算法方面(SLAM、地图模式匹配、三角测量),并最终在ASIC中使用算法的硬件。
随着自动化需求的增长,自治运营商希望能够适应不断变化的需求和动态环境。机器人和机器人路径需要适应环境,而不是反过来。
但是,导航是否如此重要,以至于成为划分AMR的基础能力之一?
我们认为不是的。
是的,导航很重要。事实上,在某些情况下,它是如此重要,以至于制造商认为它是一个关键的区别因素。
但对其他制造商来说,导航只是另一个需要打勾的选项;他们把导航技术当作达到目的的手段,希望能够挑选出最适合特定使用情况的导航技术,就像他们对部件所做的一样。
他们可以从现有的众多导航技术中选择一个能满足他们所有要求的技术。
在这种情况下,重要的能力是能够轻松地集成任何导航技术,帮助开发人员满足他们的需求,或者允许他们自己轻松开发,如果他们选择的话。
实现这一点的是一个机器人软件开发环境,它包含了库和API,使他们可以选择以同样的方式构建或购买。
运行中的AMR软件
工厂和仓库包含机器人车队,它们需要被告知在任何特定时间做什么。更重要的是,由于不断变化的需求,行驶命令可能会改变,执行任务的最佳方式可能会根据环境条件的变化而改变。
车队和任务管理以及路径规划需要通信、本地或中央决策能力,以及与其他系统的接口,如安全摄像机、安全笼、门、电梯等。更重要的是,它们需要向负责它们的人传达状态、位置、安全等信息。
车队模拟始终是大型AMR自动化项目的一部分。二维/三维模拟使自动化服务提供商能够准备好自动化任务的完整逻辑。它的特点是压力测试、规模规划和一般运营研究的KPI。
其他操作软件包括自动化集成商用于在特定地点部署机器人的工具、监控工具、软件版本控制等。
所有这些能力都不属于AMR制造商的核心竞争力。恰恰相反--开发这些能力需要时间和精力,使他们偏离核心任务。
机器人引擎平台--AMR技术格局中的缺失环节
与以往相比,比较AMR和AMR制造商的最佳方式不是他们使用的具体技术组件,而是他们的能力:
· 迅速开发差异化的产品
· 轻松挑选组件和第三方功能,为特定需求优化AMR
· 提供定制的解决方案
· 快速、无缝地集成到现有的自动化环境中
· 用有效的接口、数据和工具支持用户
所有这些功能都需要对不属于AMR核心功能的操作或功能软件进行大量投资。这些包括像安全、用户管理、测试、模拟等等。它们需要结合开发工具、库、现成的集成和开放的API。
使用开发工具和预先开发的资产的组合,或一个软件开发引擎,是其他行业的普遍做法。
一个新的类别正在出现,即机器人引擎平台,专门用于AGV/AMR软件开发。
机器人引擎平台包括自主移动机器人软件开发工具,如IDE、现成的功能性和非功能性AMR软件组件和简单的API。
AGV/AMR制造商在该平台内有完全的灵活性,既可以选择现成的组件,也可以利用提供的工具开发自己的机器人软件。
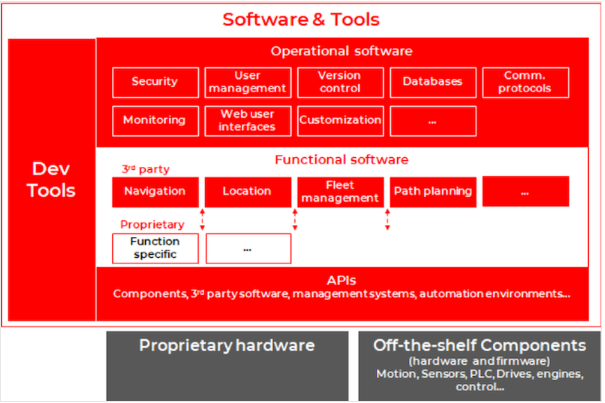
使用机器人引擎平台的概念性AMR / AGV架构
AGV/AMR制造商使用机器人引擎平台是一个明确的指标,他们将能够更快地提供产品,并具有更多的灵活性和定制。更重要的是,他们专注于自己的核心竞争力的能力可能表明他们有更好的产品。
ROS(机器人操作系统)包含这些工具的一部分。MOV.AI是一个全面的机器人引擎平台的例子,它允许为自主移动机器人进行快速和灵活的软件开发。
结论
制造业和仓库中的货物运输车辆的要求正在发生变化。对可扩展的、灵活的、定制的解决方案的需求不断增加,加上市场拥挤,需要不同的AMR软件开发方法。
在这个市场上竞争的一个关键因素是使用机器人引擎平台来满足上市时间、功能要求和非功能要求。这个重要的部分是AGV/AMR技术分析中缺少的环节。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号