操作员界面具有两个警告指示器:
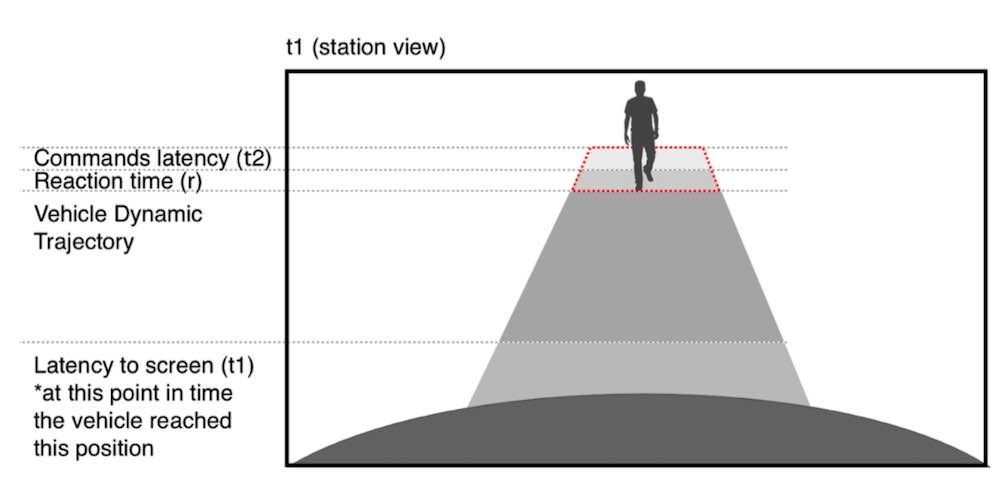
A. 碰撞避免 DT:显示车辆将触发碰撞避免的距离,以使操作员的期望与车辆进行干预时的实际操作保持一致。为确保准确性,站端 DT 会根据视频馈送的玻璃到玻璃延迟进行调整。
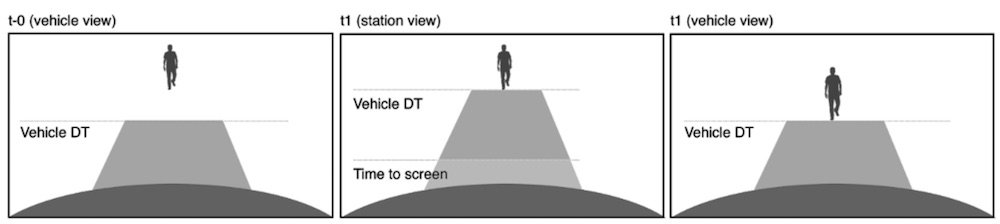
B. 碰撞警告 DT:显示操作员应该开始制动以防止碰撞的距离。这不仅包括对视频延迟的预先调整,还包括运营商的反应时间。
避免正面碰撞可能是最简单的一个功能,但它并不是唯一的功能。

远程控制开车已经是一件非常不容易的事情了,增加延迟和基于摄像头的态势感知会使其变得更加困难。通常,远程操作员都会选择间接控制方法。所以ATAS 必将成为远程驾驶的关键任务。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号