钣金折弯机器人自动化技术关注的是机械手的设计和用于控制它的计算机系统,它还涉及工业机器人的相关应用,具体内容如下文所述。
数控机床机器人学的发展
工业机器人技术可以看作是数控技术和遥操作技术的结合。数控技术提供了可编程工业机器的概念;而遥操作技术则提供了机械臂的概念。可以执行有用的工作的第一个工业机器人安装于1961年,用于从压铸操作中卸下零件。它的发展主要归功于美国发明家乔治·德沃尔和商人约瑟夫·恩格尔的努力。德沃发明了可编程机械手的设计,1961年获得美国专利。恩格尔伯格与德沃公司合作,推动机器人在工业中的应用,并在机器人大学成立了第一家公司。
什么是工业机器人学?
机器人学基于两种相关技术:数控和遥操作数控(NC)。它是一种通过在穿孔纸带或其他介质上编码的数字来控制机床轴的方法。它是在20世纪40年代末50年代初开发的。1952年,美国麻省理工学院(MIT)展示了第一台数控机床。麻省理工学院的后续研究与开发,致力用于编程机床的 APT(自动编程工具)语言。
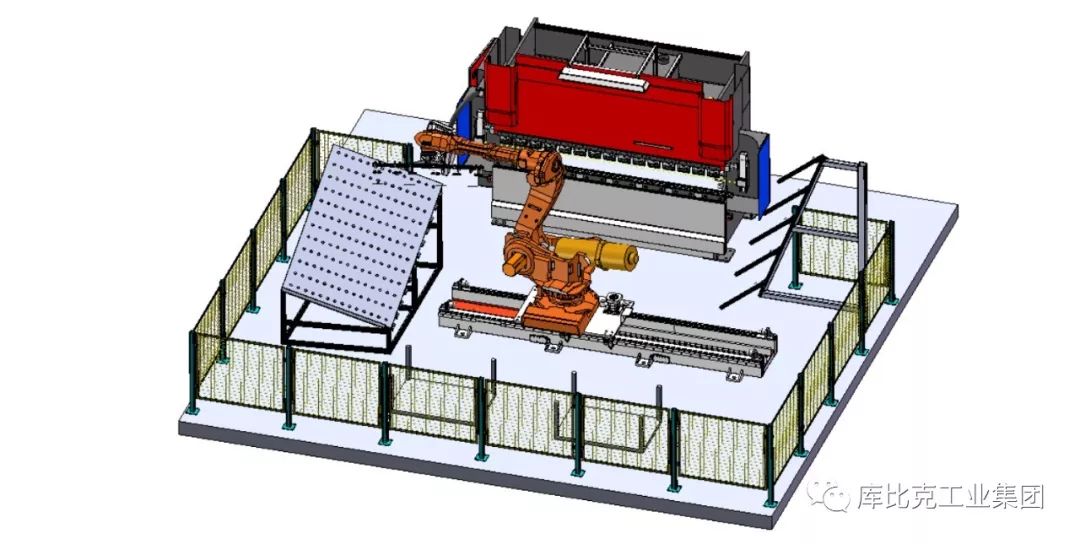
折弯机器人的发展与历史
机器人折弯的遥操作器是一种机械机器人手。人远程控制遥操作器设计的最初研发,基于20世纪40年代早期对放射性物质的处理。在一个典型的实例中,人在一个位置移动机械臂和手,这些运动由机械手在另一个位置复制。
全自动生产中的工业机器人:什么是机械手?
工业机器人最广泛被接受的定义是由机器人工业协会制定的:
工业机器人是一种可重新编程的多功能机械手,设计用于通过可变编程运动移动材料、零件、工具或专用设备,以执行各种任务。
机器人折弯机的机械手由一系列的连杆和关节组合,而连杆是连接接头的刚性构件关节(也称为轴)是机器人的可移动部件,可在相邻连杆之间产生相对运动。胜驰全自动折弯机的机械手为六轴。一般,六轴及其以上更高配置的数控折弯机可以设计成机器人折弯机。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号