每个粉盘由3D Cognex摄像机进行检测,检测结果为“通过(pass)”或“未通过(fail)”,如果粉盘未通过检测,UR3协作式机器人会将该粉盘放入废品箱。
在压机中,粉末被推入粉盘,之后粉盘会在Cognex的3D断面仪探头下移动,3D断面仪将对其进行表面检测和测量粉末在盘中的体积。如果粉盘通过检测,则UR3协作式机器人会将其取出。
▎尽管生产速度快,但十分安全
协作式机器人是为了与工作人员安全地协同作业而设计的。然而,为了满足既定的生产速度,科蒂需要将机器人的速度和力量提升至协作限值以上。为了保护操作人员,Sydorko增设了轻质树脂玻璃防护栏和光幕。这些防护措施不会阻碍推车的移动,但一旦工作人员打开门或穿过机器人的活跃区域,机器人会立即降至安全的协作速度。只要工作人员关上门或离开光幕,机器人就会恢复最大速度。
Sydorko说:“我们可以将机器人设置为我们需要的速度,同时你也可以让机器人与工作人员协同作业,这样更能发挥作用。这才是两全其美。”
Sydorko经常被问到他为什么选择优傲机器人而不是高速的传统工业机器人。其中一个关键原因是,传统的机器人无法使用低功率电源。他说:“目前,我们推车使用的电源电压是110伏,而我们需要240伏或480伏才能运行一个传统的工业机器人。在如此高的电压下,移动推车会面临极大的挑战,操作人员也会面临更高的风险。”传统高速机器人的重量以及控制平台的大小也是其中一个因素。
▎协作式集成工艺是取得成功的关键。
现如今,基于协作式机器人的系统已经建立,科蒂团队可以在内部管理该系统。Baublitz说:“如果出现任何需要解决的故障,与我们合作的集成商随时能为我们提供帮助。但在这一点上,我们已经运行推车数月时间,已经能够应对自如,可以解决99%的内部问题。”


科蒂化妆品公司的员工与优傲协作式机器人在同一工作区里工作。
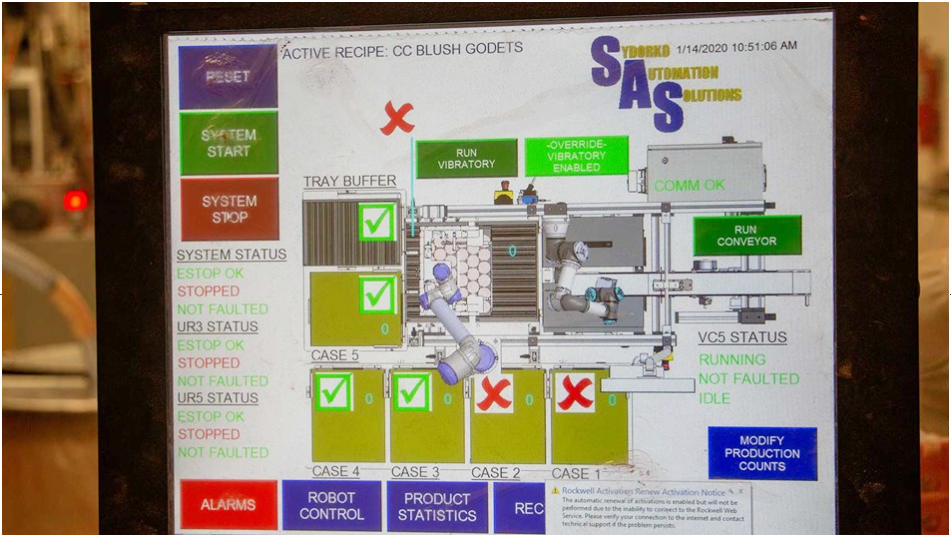
该自动化应用集成了Allen Bradley PLC,其使用以太网IP与UR3和UR5控制器以及Cognex 3D视觉系统进行通信。“通过Allen Bradley PLC,我们可以传输非常大的数据流,并能够汇集我们想要的任何和所有的信息。”集成商Chris Sydorko说道。科蒂可以中央HMI来管理“配方”选择(即不同类型的粉盘),中央HMI可以为两个机器人控制器和摄像机提供数据,其中摄像机也可以通过以太网返回检测数据。

起初,科蒂化妆品公司的一些员工担心机器人会接管他们的部分工作,但现在,由于协作式机器人帮他们做了很多繁琐的工作,比如对每件产品进行质量检验,他们非常感激这些新的机器人同事。
Baublitz解释道:“现在,一台电脑就能完成所有这些工作。”科蒂化妆品的项目经理Paul Baublitz说道。“一旦发现需要改进的地方,你可以立即做出反应。”














 粤公网安备 44010602004352号
粤公网安备 44010602004352号