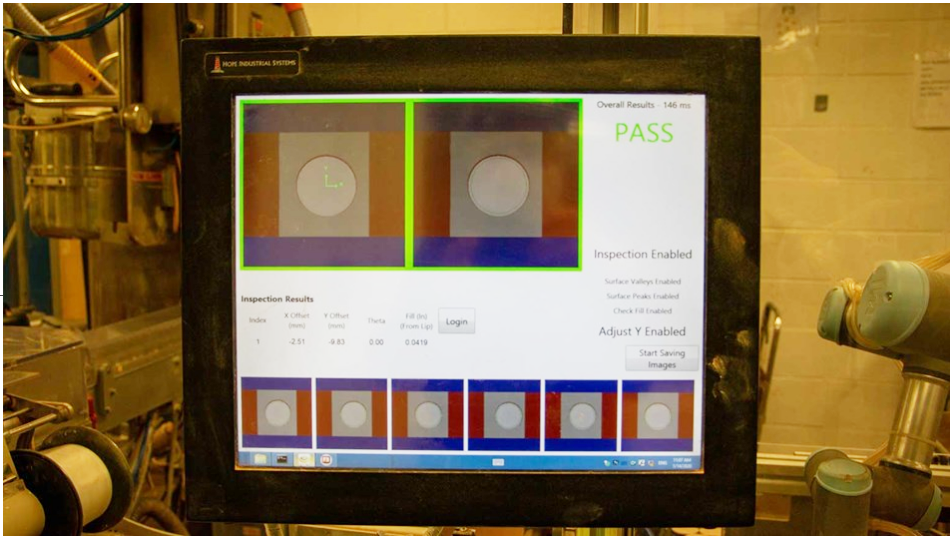
该自动化流程包括拿起装粉饼的粉盘,并将它们放在盒子里的托盘上,然后送往不同的终端进行最终处理。在压机中,粉末会被推入粉盘,之后粉盘会在Cognex的3D断面仪探头下移动,3D断面仪将对其进行表面检测并测量粉末在盘中的体积。
如果粉盘通过检测,一台UR3机器人会根据不同的产品类别,将它们分成两组或四组,放在一个托盘上。等到托盘装满,一台UR5机器人就会拿起托盘,将其移动到纸箱处,并将其放入纸箱。随后,UR5机器人会移动到存放空托盘的地方,拿起一个托盘并将其放回托盘准备区域,等着把下一个托盘装满。
▎移动协作式机器人
支持许多产品组合的快速转换
目前,这种以协作机器人为基础的推车能够操作多达10种不同的产品“配方”,适用于不同的粉盘形状,如圆形、正方形或长方形,同样适用于不同的厚度和重量,每次可从压机中取出一到两种产品。这种推车机器人的设计适用于多达20种产品“配方”。
快速部署和转换是自动化应用中需要克服的关键难题。得益于优傲机器人,科蒂能够在四辆推车上分别安装UR3和UR5协作式机器人,这些推车可以从一台压机推到另一台压机旁。
Baublitz说:“这比在12个不同的站点上安装机器人的性价比要高得多。从经济角度来看,通过这种方式,不可能的项目变成了现实。赋予这些机器人移动性能,是推动项目发展的关键。”移动协作式机器人的设置时间(从拔掉电源,移动到一个新的压机旁,到再次设置)通常只需15到30分钟。
“安装在推车上的协作式机器人方案比在12个不同的站点上安装一个固定的机器人的性价比要高得多。从经济角度来看,通过这种方式,不可能的项目变成了现实。”
——科蒂化妆品公司的项目经理
▎缩短投资回报周期
改善工作环境和提高质量机器人
得益于这个协作式自动化项目,科蒂预计每年将节省50万美元。除了该项目的投资回报率相当可观,科蒂还发现了其他好处。
机器人的工作地点灰尘多、噪音大,大型压机会产生巨大的震动。既然机器人可以在这样的环境下工作,科蒂就能让员工远离这种环境,并重新部署员工,让他们完成重复性低且更有趣的任务。
Baublitz解释道:“一旦该项目彻底落实,我们就会实行三班倒,使用四辆推车,每周工作5天,在该区域工作的员工数量将减少13人。这对公司来说是一个重大转变,大大提高了效率,团队对此也非常欣喜。”
Baublitz还提出了一种全新的质量方案,即把Cognex检测系统添加到自动化工作单元中。在此之前,这属于操作人员需要执行的许多任务之一。Baublitz解释道:“现在,一台电脑就能完成所有这些工作。一旦发现需要改进的地方,我们可以立即做出响应。”

UR5机器人将一个装满粉盘的托盘放入纸箱后,会移动到存放空托盘的地方,拿起一个空托盘并将其放到托盘准备区域,等着下一个托盘放置到UR3机器人面前。


把协作式机器人安置在四台移动推车上,这些推车可以在12台压机之间移动,这样一来就让科蒂化妆品公司的自动化项目成为可能。如果公司选择使用传统的工业机器人,他们将需要在12台压机的每台旁边安置一个固定的机器人,这样就会超出预算。两辆推车支撑着生产大量产品的压机,所以很少移动。另外两辆推车每天都要移动,通常每三个班次移动一次。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号