二、激光导航的关键性问题
1.定位与构建地图
无论是物流仓储的货物分拣,还是生产制造的物料搬运,对于激光导航AGV而言,都需要在调试阶段存储完整的地图信息,然后再投入运行,且运行阶段可不对全局地图进行修改或仅进行适当的修改。
获取精确的地图信息是十分重要的,直接影响到运行阶段的定位导航精度。一方面可以通过多次静态探测,将多幅局部地图进行拼接,得到完整的地图信息。另一方面,也可以通过同时定位与建图(slam)得到完整地图。
2.用于定位的内部传感器
通过用于定位的内部传感器(AGV舵轮的驱动、转向编码器,或者AGV的惯性测量单元等),可以对AGV位置进行求解。但是,这些内部传感器难免存在一定的不足。为了提高定点停车的定位精度,需要改善定位算法,更重要的是,可以通过增强外界环境信息来提高定位精度。具体方法有如下几种:
(1)增加反光板数量;
(2)在停车位置附近构建局部特定轮廓;
(3)引入磁钉、二维码等导航方式;
(4)在AGV上加入视觉传感器,扫描物料或托盘,实现AGV与目标物的精准对接。
三、激光导航的发展趋势
1.导航方式复合化
在大部分行驶区域,AGV进行自然导航,在定位精度要求高的局部区域布置激光反射标记物进行导航。不仅如此,根据应用场合的需求,可以再引入磁条、磁钉、二维码等导航方式,提高AGV的导航精度与可靠性。
2.行驶路线的柔性化
面向工厂的AGV需要做到高可靠性、高效性,因此,基本上都是沿着预先设计好的固定路径行驶。如同火车必须沿着轨道行驶一般,虽然可以选择轨道,但是不能脱轨。
对此,可以将AGV接近取放货站台的分支末端的固定轨迹取消,允许AGV在接近终点的区域根据当时的环境信息,进行自我规划路径。如此,一方面可以减少前期调试期间设计行驶线路的工作量,一方面也可以提高系统柔性,对在终点附近的障碍物有一定的避障作用。
3.导航信息模块化
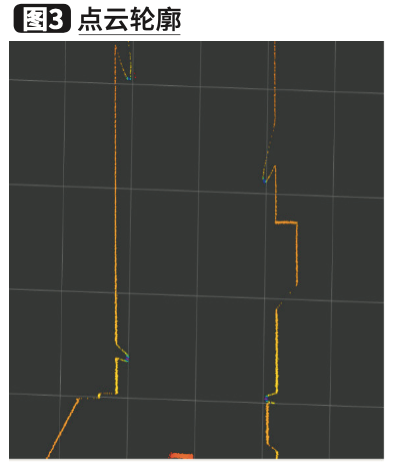
激光雷达基本的作用是通过探测周围区域,获取外界环境的轮廓,以点云的形式得到地图信息,如图3。
有的激光雷达生产厂商,不仅提供了可配套兼容的驱动器及编码器,还增添了独立的导航模块,导航模块内置定位算法,可以得到优化后的地图信息和AGV的实时位置,减少了研发人员二次开发的难度,缩短开发周期。
四、总结
激光导航AGV具有较高的可靠性、精准性、灵活性,能够适用于大部分的生产领域。基于反射标记物的激光导航方式,技术相对成熟。自然导航因其具有更好的灵活性,具有较大的发展潜力。基于上述两种方式的复合式激光导航,同时兼顾可靠性与灵活性,具有极高的研究价值。
地图构建是激光导航AGV十分重要的内容。激光导航结合AGV内部定位传感器可以获得更好的导航质量。在激光导航的基础上,引入新的导航方式用以辅助,配合外部环境添加的额外特定轮廓,可以使定位精度和可靠性进一步提升。
由于激光导航AGV具有较大的市场需求和较为广阔的应用场景,AGV激光导航技术还应不断提升和完善。未来的激光导航AGV,导航方式复合多样化,行驶路线更加灵活自由,导航信息的获取和使用更加方便,便于开发调试人员以及生产操作人员的使用和维护。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号