背景介绍
■ 刚性机器人存在许多局限性
■ 刚性机器人笨重且昂贵
■ 软体机器人可以通过简单的设计和控制产生复杂的运动方式,并且能够 很好的适应不同的应用环境
■ 目前阶段对软体机器人的研究较少,软体机器人有很大的发展潜力
软体机器人的构成
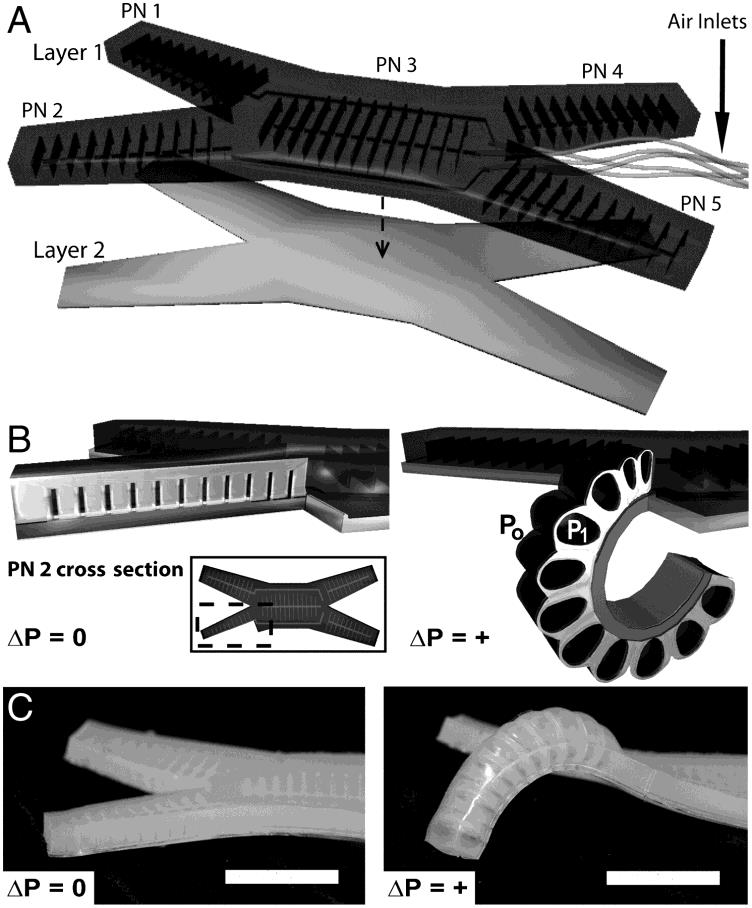
制造的软体机器人由上下两层构成
■ Layer1为Ecoflex(Ecoflex 00-30或Ecoflex 00-50; Smooth-On Inc.)制成的驱动层,它在低应力下具有高度可伸长性
■ Layer2为聚二甲基硅氧烷(PDMS)(Sylgard 184, Dow Corning)制成的应变限制层,因为它在压力增加时产生的应力相对不可扩展
在Layer1中存在通过软光刻制造的腔室
■ 腔室在气体压力作用下膨胀。可伸展顶层和不可伸展底层之间的应变差异导致PN在加压时弯曲。我们通过其腔室的方向,尺寸和数量调整了PN的弯曲运动
软体机器人的运动原理
软体机器人的运动
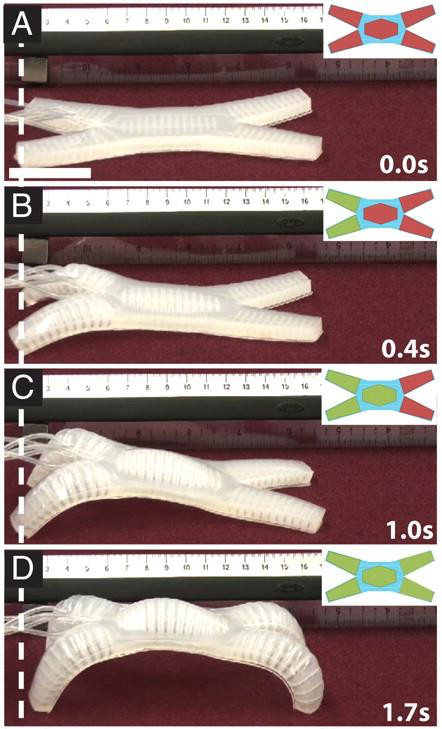
软体机器人的第一种运动步态—蠕动(起伏)
■ 通过依次加压PN来控制机器人运动
■ 蠕动涉及三个步骤,从静止状态到PN 1的加压和PN 2, 这个动作使机器人不能向后滑动。PN 3的加压使其脊柱从表面抬起。PN 4和5的加压,PN 1和2的顺序减压,然后PN 3用两个前肢拉动机器人向前
■ 此时,后三分之二的机器人与表面摩擦接触; 此各向异性在前面和后半部之间的摩擦接触导致向前运动时,我们减压的PN 4和5。在这个步态中,软体机器人的速度为13±0.6m/h(约93体长/小时;体长/周期的11%)

软体机器人的第一种运动步态
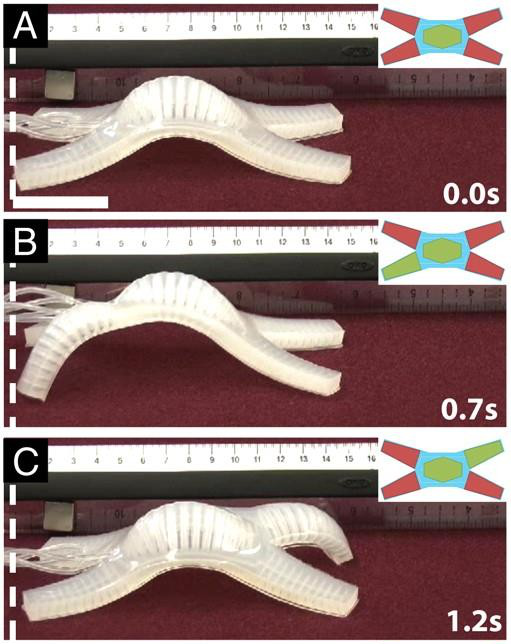
软体机器人的第二种运动步态—爬行
■ 爬行运动包括五个步骤:第一步加压PN 3,脊柱离开地面
■ 第二步加压PN 4向前拉动右后肢
■ 第三步PN 2的同时加压和PN 4的减压然后推进四脚向前
■ 第四步在减压PN 2的同时加压PN 5将左后肢向前拉
■ 第五步PN 1的同时加压和PN 5的减压再次推动了机器人的身体前进
■ 这种步态推动机器人的运动速度为24±3m/h(192体长/ 小时;体长/周期的12%)

软体机器人的第二种运动步态
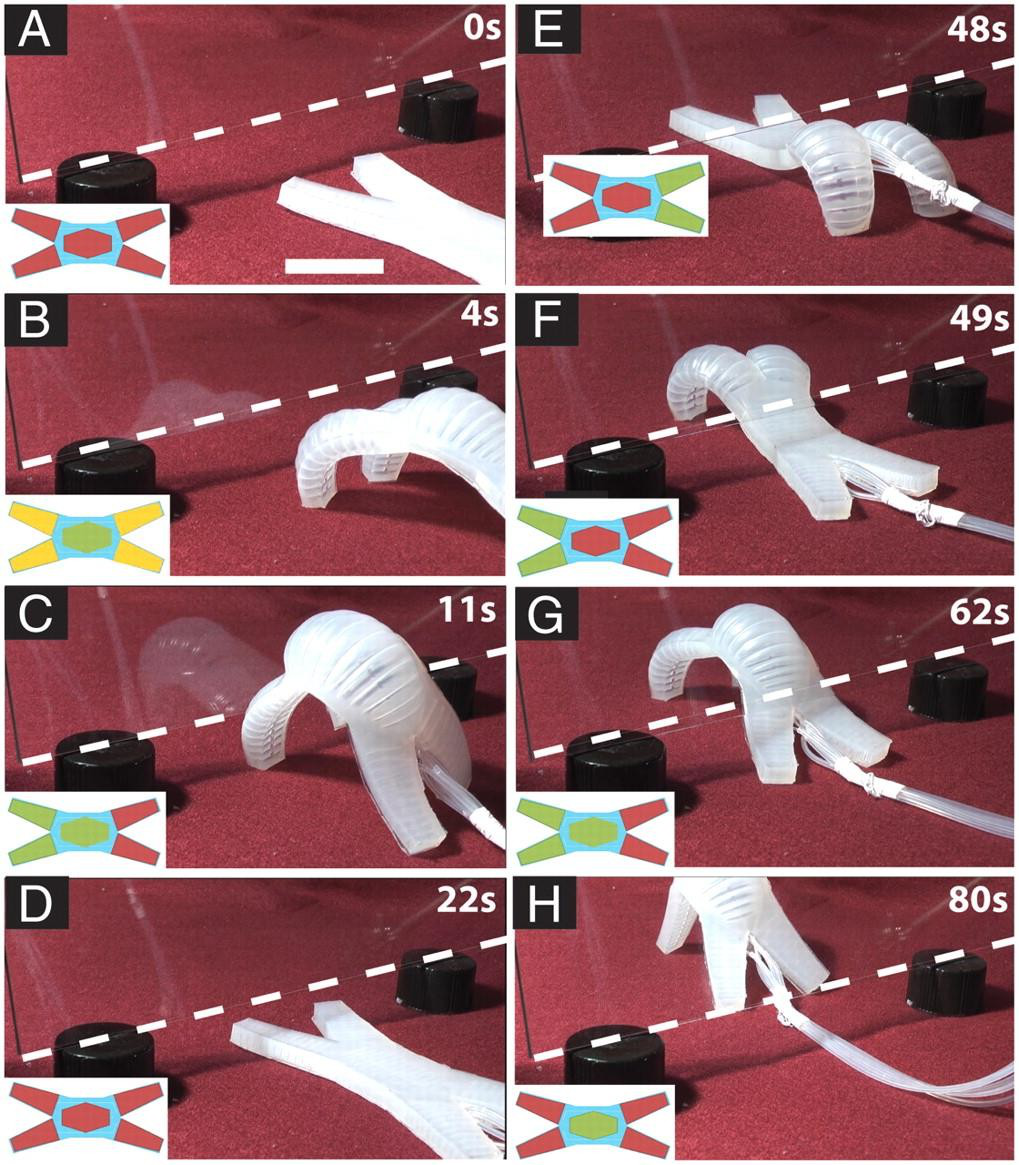
软体机器人越障实验
障碍类型
■ 使用厚度为0.9cm的软体机器人通过高度为为2cm的地面与玻璃板之间的缝隙
运动方式
■ 使用简化的爬行运动,我们将机器人驱动到障碍物附近,变换到蠕动的运动类型。并按照蠕动的加压方式控制软体机器人运动,待机器人通过障碍后再恢复到爬行运动
■ 我们将机器人在间隙下驱动超过15次,大多数尝试需要不到60秒就能完成越障
软体机器人的越障过程
结果与讨论
■ 文章研发了一种具有多种运动方式的软体机器人,其主要的运动原理是通过伸展层中腔室的气压变化导致伸展层发生形变。并在抗拉伸层的共同作用下使软体机器人运动
■ 并研究蠕动、爬行两种运动方式,给出了在两种运动中软体机器人的腔室加压
方式及机器人运动速度
■ 最后通过越障实验证明了该软体机器人在运动方式上的优越性















 粤公网安备 44010602004352号
粤公网安备 44010602004352号