为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。之前分别介绍了仙知网络协议API的概念、类别、使用教程及如何查询机器人状态API中的“机器人信息”和“机器人运行信息”等,本期将介绍“如何查询机器人被阻挡状态”、“如何查询机器人抱闸状态”及“如何查询机器人激光点云数据”:
如何查询机器人被阻挡状态
一、查询机器人的被阻挡状态
1、请求
编号: 1006 (0x03EE)
名称: robot_status_block_req
描述: 查询机器人的被阻挡状态
JSON 数据区: 无
2、请求示例
略
3、响应
编号: 11006 (0x2AFE)
名称: robot_status_block_res
描述: 查询机器人的被阻挡状态的响应
JSON 数据区: 见下表

4、响应示例
略
如何查询机器人抱闸状态
二、查询机器人抱闸状态
1、请求
编号: 1008 (0x03F0)
名称: robot_status_brake_req
描述: 查询机器人抱闸状态
JSON 数据区: 无
2、请求示例

3、响应
编号: 11008 (0x2B00)
名称: robot_status_brake_res
描述: 查询机器人抱闸状态的响应
JSON 数据区: 见下表

4、响应示例

如何查询机器人激光点云数据
三、查询机器人激光点云数据
1、请求
编号: 1009 (0x03F1)
名称: robot_status_laser_req
描述: 查询机器人激光点云数据
JSON 数据区: 无
2、请求示例

3、响应
编号: 11009 (0x2B01)
名称: robot_status_laser_res
描述: 查询机器人激光点云数据的响应
JSON 数据区: 见下表

数据示例:
如下为三个激光点的数据:
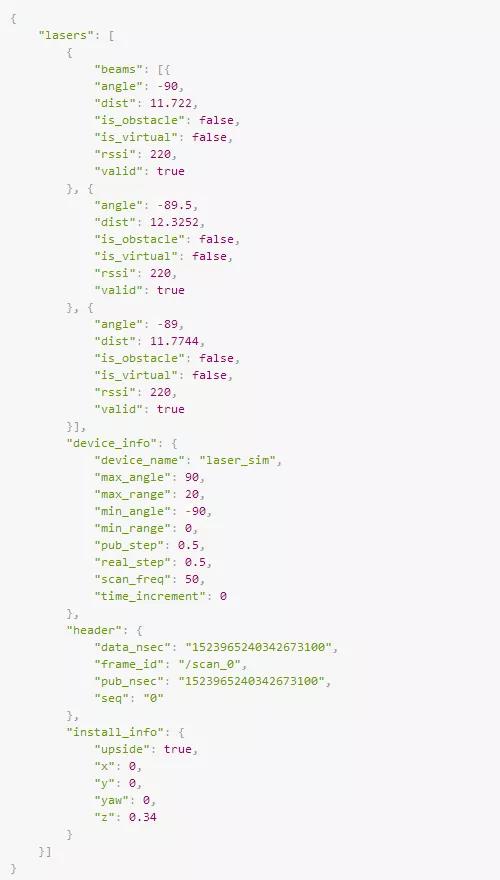
(提示:为方便阅读,这里 JSON 数据采用了展开的形式, 实际使用中为减少数据流 JSON 数据区是紧凑的, 不会有多余的空格与换行)
4、响应示例
略
上海仙工智能科技有限公司(简称仙工智能或 SEER)由 RoboCup 世界冠军团队创立,是一家以智能控制及数字化为核心的工业物流解决方案提供商。公司总部位于上海,全国设有 7 个办事处、2 个生产基地,业务遍及全球 20 多个国家和地区。
仙工智能掌握世界领先的技术与理念,打造智能、高效、可靠、易用的端到端工业物流解决方案,方案涵盖移动机器人控制器、各类移动机器人及相关数字化系统软件,帮助客户降本增效,实现智能化与数字化升级。
以【惠人达己,守正出奇,始终创业,追求极致】的品牌价值观为导向,凭借卓越的产品力、方案力与服务力,仙工智能为西门子、菲尼克斯、潍柴动力、格力等全球 800 多家企业提供服务。客户覆盖半导体、3C、锂电、光伏、汽车零部件、PCB、纺织、医疗等行业,项目交付率达 100%。仙工智能,以实力引领工业物流智能化进程。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号